霍克充电机CAN通讯介绍
1.CAN报文结构:CAN报文由ID(标识符)、数据帧等组成,主要关注报文ID、数据内容、发送周期。例如,直流充电网的报文结构包括序号、控制字、数据长度、数据包个数、预留字节、PGN(报文组号)等。
2.通信标准:CAN物理层规定了充电机与BMS之间通信的接口、电气特性和传输速率等要求。推荐使用250kbit/s的传输速率,并且使用符合ISO11898-1:2003标准的屏蔽双绞线接口。
3.CAN帧格式:CAN帧格式由起始位、仲裁域、数据域、控制域和结束位组成。每个CAN帧包含一个PDU(协议数据单元),PDU由优先权、保留位、数据页、PDU格式、PDU特定、源地址和数据域组成。
4.通信流程:充电机与BMS的CAN通信包括充电握手阶段、参数配置阶段、充电阶段和充电结束。在握手阶段,BMS识别接入的是车载充电机还是直流充电桩,以选择对应的通信协议。充电阶段,BMS控制继电器闭合使主回路导通,实现电池组充电。安全监控帧处理确保了充电系统的安全性和可靠性。 恒流充电模式:在电池电压上升到涓流充电阈值以上时,充电机提高电流进行恒流充电。湖南充电机官网
充电机相关参数指标说明:
1.输入电压:充电机接受的电源电压,通常为交流220V或直流380V。
2.输出电压和电流:充电机输出的电压和电流,这些参数决定充电机与电池的匹配程度以及充电速度。
3.充电功率:充电机输出的功率,例如常见的3.3kW、6.6kW、11kW和22kW,影响充电时间。
4.转换效率:充电机将输入的电能转化为输出电能的比率,效率越高,散热需求越低,性能越好。
5.功率因素:充电机功率因数的校正能力,影响电网负载和能效。
6.谐波:输出电流的谐波含量,影响电网的清洁度和充电机的EMI性能。
7.输出纹波:直流输出电压中的交流成分,影响电池的充电质量。
8.充电方式:交流充电和直流充电,适用于不同的功率需求和场景。
9.安全性:充电机应符合国家相关安全标准,具备过压、过流、短路等保护功能。
10.兼容性:充电机应支持多种充电接口,满足不同型号电动汽车的充电需求。
11.智能化:具备远程监控和管理功能,提高充电效率和安全性。
12.尺寸、重量和工作温度:影响充电机的安装、移动和使用环境适应性。
13.防护等级:如IP54至IP65,保护充电机免受尘埃和水的侵害。
14.电磁兼容性(EMC):车载充电器等产品需符合电磁兼容性指令的要求,通常基于EN50498标准进行测试和认证。 重载AGV定制AGV充电机用户手册一般选择与蓄电池品牌配套的叉车充电器,以确保兼容性和充电效率。比如充电机都选用霍克品牌的。
充电机的能耗与其设计、效率的重要因素:
1.**充电机效率**:充电机的运行效率是影响能耗的一个重要因素。例如,高频充电机通常具有较高的运行效率,这意味着它们的能耗相对较低,同时噪音也较低,适合办公场所使用。
2.**充电形式**:电动汽车的充电形式分为慢充和快充,慢充通常使用220V家用电压,最大功率在7kW左右,而快充使用60kW或120kW的快速充电桩,充电功率更大,充电时间更短。
3.**能耗计算**:电动汽车的能耗计算通常基于充入电量而非标称电量。这是因为电池的标称电量是在特定测试环境下得出的,而实际使用中会有一定比例的冗余电量以保证电池安全。
4.**充电速度与能耗**:充电速度的快慢直接影响能耗水平。例如,特斯拉Model3使用7kW充电桩充满电需要约11小时,而使用11kW或21kW充电桩则大约需要7小时,尽管21kW充电桩理论上充电速度更快,但由于车载充电机的限制,实际充电功率可能只能达到11kW。
5.充电桩功率选择:充电桩的功率选择取决于可用的电源条件和充电需求。例如,7kW充电桩适用于单相电表,而11kW和21kW充电桩需要三相电表。
6.充电机维护:适当的充电机维护可以降低能耗并延长使用寿命。例如,应定期清洁充电机,避免剧烈震动或暴露在高温和潮湿环境中。
霍克AGV自动充电机特点:
1.人机界面:采用4.3”串口LCD彩色触摸屏,显示充电过程参数;设置充电阶段各个参数。
2.充电数据记录:在LCD屏上,检查充电过程事件记录。EEPROM记录充电数据,可以进行记录数据分析。SD卡记录充电过程曲线,通过PC机读取。(选配)预约时间充电功能:可以设定定时充电开始时刻,利用谷底用电进行充电,节省电费。
3.设置参数失电保护:对于用户设置的参数,系统可长久记忆,停电也不丢失。
4.输入电源相序:对电网无相序要求,A、B、C三相输入可任意接线。
5.特殊充电功能:强制启动(0V)功能、充电中途连接线脱落,充电机自动关机(电池脱落检测)。
6.保护功能:开路、接反、过流、过压、过热、电源缺相等的故障保护和报警功能。
7.输出控制接口:相关报警触点输出。(选配) 无线充电:无需物理接触,为柔性化布局及特殊工业提供便捷的充电解决方案。

AGV/AMR充电节拍怎么计算:
1.**确定AGV的工作时间**:记录AGV在没有充电的情况下能够连续工作的时间长度。
2.**了解AGV的电池容量**:获取AGV电池的总容量,通常以安时(Ah)为单位。
3.**测量AGV的能耗**:计算AGV在单位时间内的能耗,这可以通过电池的放电率来估算。
4.**计算充电时间**:根据AGV的电池容量和充电机的输出功率来计算完全充电所需的时间。如果充电机的输出功率已知,可以使用以下公式:充电时间=耗电电量/充电电流
5.**考虑充电效率**:实际充电时间可能因为充电效率(通常小于100%)而有所不同。充电效率可以由制造商提供或通过实际测试获得。
6.**确定充电周期**:基于AGV的使用模式,确定何时进行充电。例如,如果AGV在晚上不工作,可以选择在这段时间内进行充电。
7.**计算充电节拍**:充电节拍是指AGV完成一次工作任务后返回充电站进行充电的频率。如果AGV的工作时间和充电时间已知,可以计算AGV在一天内需要充电的次数,从而确定充电节拍。
8.**优化充电策略**:根据AGV的工作模式和任务需求,可能需要优化充电策略以减少充电次数和提高效率。例如,可以在AGV的低峰时段进行充电,或者使用快速充电技术。 霍克智能充电机是专为AGV(自动导引车)/AMR(自主移动机器人)应用精心打造的充电解决方案。重载AGV定制AGV充电机多少钱
霍克充电机采用先进的高频开关技术,结合模块化组合结构设计,确保了系统的紧凑性与可扩展性。湖南充电机官网
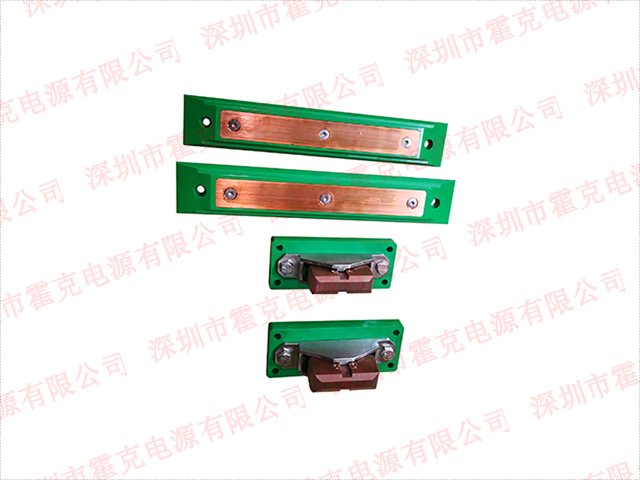
自动充电系统是电动汽车的重要组成部分,它允许车辆在连接到电源时自动充电,无需人工干预。一个典型的自动充电系统通常由以下几个关键部件组成:
1.充电插座:用于连接外部电源和电动汽车,是电能传输的起点。
2.充电线缆:传输电能,连接充电插座和电动汽车的充电接口。
3.充电控制器:盒芯组件,控制充电过程,监测电池状态、充电电流和电压等参数,确保充电过程安全可靠。
4.充电连接器:连接充电线缆和电动汽车的充电接口,确保电能顺利传输。
5.充电桩/充电站:提供充电设备和服务,可以是公共充电站或私人充电桩 湖南充电机官网