
腾讯开发的机器人小五,采用轮、腿、足复合设计,使得它具备越障能力的同时,也保持了轮式机器人的运行效率。每条腿都可以单独伸长缩短,能有效提升承载能力。装上了双编码器大扭矩密度的执行器后,就能承受住一般成年人的重量。将机器人用于养老服务领域,能够帮老人取快递,抱老人起床,带老人进行活动。机器人内置RGB...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
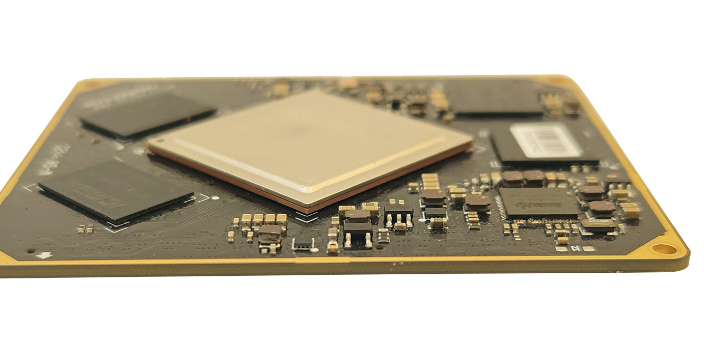
瑞芯微推出的RK3588系列图像处理板作为国产化板卡的性能前列,成为了各领域研究开发的优先,它能在诸多行业实现目标检测、识别以及跟踪等功能,具有重要的研究开发价值。特别是对于高校而言,将RK3588作为课题进行研究开发,是一个不错的选择。但是在这些功能实现过程中,算法的能力就十分重要,如何让算法更加精细的识别检测例如人、车、船等目标成为首要解决的问题。要想让AI算法更能精确的识别检测目标,可以利用AI的深度学习能力,让AI不断学习这些目标的特征,从而达到精细识别的能力。这个过程,可以通过大量的数据标注,来训练AI。但大量待标注工作,常常让开发者头疼。如果采用传统方式用人工挨个挨帧标注,将会耗费大量时间精力,让成本不可控。数字接口转网络输出的视频跟踪板。福建高效目标跟踪
目标跟踪
另外,经典的跟踪方法还有基于特征点的光流跟踪,在目标上提取一些特征点,然后在下一帧计算这些特征点的光流匹配点,统计得到目标的位置。在跟踪的过程中,需要不断补充新的特征点,删除置信度不佳的特征点,以此来适应目标在运动中的形状变化。本质上可以认为光流跟踪属于用特征点的来表征目标模型的方法。在深度学习和相关滤波的跟踪方法出现后,经典的跟踪方法都被舍弃,这主要是因为这些经典方法无法处理和适应复杂的跟踪变化,它们的鲁棒性和准确度都被前沿的算法所超越,但是,了解它们对理解跟踪过程是有必要的,有些方法在工程上仍然有十分重要的应用,常常被当作一种重要的辅助手段。江苏数据目标跟踪慧视RV1126板卡可以用于大型公共停车场。

腾讯开发的机器人小五,采用轮、腿、足复合设计,使得它具备越障能力的同时,也保持了轮式机器人的运行效率。每条腿都可以单独伸长缩短,能有效提升承载能力。装上了双编码器大扭矩密度的执行器后,就能承受住一般成年人的重量。将机器人用于养老服务领域,能够帮老人取快递,抱老人起床,带老人进行活动。机器人内置RGBD相机,在图像处理板的赋能下,能够实时检测周边环境,进行路线规划和避障,以高效完成各项工作指令。同时能够对物体进行AI识别,判断老人位置、行为动作,为老人的行动做出帮助。
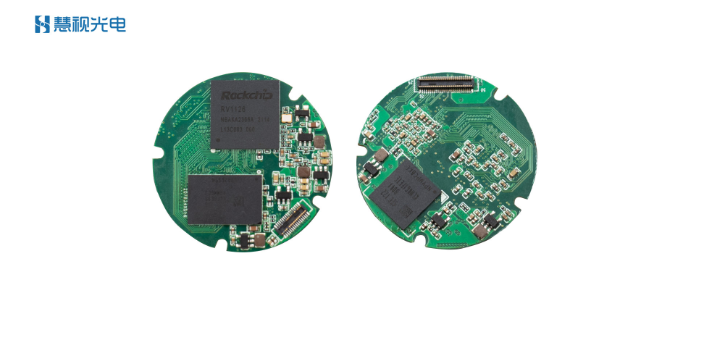
无人机只需要从基地起飞,就能够对指定区域进行巡检,智能摄像头能够自动问诊地面,识别护栏错位、路面积水、凹陷、裂缝、交通事故、车流异常等问题,然后标记位置。而控制中心能够实时查看前方画面,接收无人机回传的数据,并进行诊断分析,整个过程无需过多的人工干预。这种无人机智能问诊,是通过向无人机植入高性能的AI图像处理板以及定制专门的目标识别算法来实现的。成都慧视开发的Viztra-LE026图像处理板,就非常适合用在无人机智能化领域。这块板卡外形呈圆形设计,尺寸为ф38*12mm,功率不超过4W,整体呈现功耗低、尺寸小的特点。用在紧凑型的无人机当中也不会因为空间问题而苦恼,并且不会过多消耗无人机的续航。此外,Viztra-LE026这款图像处理板采用的是RV1126芯片,2.0TOPS的算力用在路面识别领域十分合适。RK3588系列的AI视频跟踪板。

“启明935A”系列芯片已经成功点亮,并完成各项功能性测试,达到车规级量产标准。启明935A是行业首颗基于Chiplet(芯粒/小芯片)异构集成范式的自动驾驶芯片,但并非单一芯片,而是一个家族系列。启明935HUBChiplet可以和不同数量的大熊星座AIChiplet互相搭配,再结合灵活的封装方式,快速形成不同性能等级的SoC芯片。它还支持高带宽的PBLink多芯互连,双芯双向带宽128GB/s,四芯双向带宽64GB/s。启明935A每颗芯片都支持比较大20路的1080p60摄像头输入,可应用于各类端侧AI部署。得益于大熊星座NPU天然支持Transformer结构,初步支持的模型有Yolo系列、ResNet50、PSPNet、PointNet++、TrafficSign_Retinanet、BevDet、miniCPM、Unet_ResNet50、PointPillars、PillarNest、M2track、BevFusion、PaliGemma、LLaMa-3B、8B等等。LVDS接口转网络输出的视频跟踪板。安徽目标跟踪经验丰富
高帧频的AI跟踪图像处理板。福建高效目标跟踪
目标检测和跟踪在许多应用中都具有重要的意义,例如智能监控、自动驾驶和人机交互等。传统的目标检测算法需要多次扫描图像,并使用复杂的特征提取和分类器来识别目标。然而,这些方法在实时性和准确性上存在一定的限制。随着YOLO算法的出现,目标检测和跟踪领域取得了重大突破。YOLO算法概述YOLO算法是一种基于卷积神经网络的目标检测和跟踪算法。与传统方法相比,YOLO算法采用了全新的思路和架构。它将目标检测问题转化为一个回归问题,通过单次前向传播即可同时预测图像中多个目标的位置和类别。这使得YOLO算法在速度和准确性上具备了明显优势。福建高效目标跟踪
与目标跟踪相关的文章

安徽目标跟踪要多少钱
- 福建目标跟踪销售厂家 2026-03-03
- 四川目标跟踪设备 2026-03-03
- 广东目标跟踪优势 2026-02-27
- 新疆高性能目标跟踪 2026-02-27
- 甘肃目标跟踪报价行情 2026-02-27
- 云南省时省力目标跟踪 2026-02-27
- 智能化目标跟踪多少钱 2026-02-26
- 黑龙江目标跟踪哪里好 2026-02-26
- 河南附近目标跟踪 2026-02-26
- 无线目标跟踪功效 2026-02-26
- 云南目标跟踪 2026-02-26
- 辽宁目标跟踪性价比 2026-02-26
与目标跟踪相关的产品



与目标跟踪相关的新闻
-
宁夏电力应急目标跟踪 2026-02-25 22:02:21物联网与人工智能的融合是一个多维度的技术整合过程,涉及数据的收集、分析和智能决策。这一融合的基础在于如何有效地利用物联网设备收集的海量数据,并借助人工智能技术进行深入分析和应用。物联网设备,包括各种传感器和执行器,是数据收集的前线。它们能够实时监测环境参数、设备状态和用户行为,生成大量数据。这些数据...
-
哪里有目标跟踪经验丰富 2026-02-25 09:01:55RK3588作为瑞芯微旗舰级芯片,工业级的算力受到了很多领域的青睐,但是由于前端相机的选择不同,并不是每块RK3588的图像处理板都可以直接拿来使用,需要的是根据相机接口和应用场景进行深度定制。成都慧视光电技术有限公司就有这样的快速集成定制的能力。作为拥有多年图像处理板开发经验的团队,成都慧视能够快...
-
江西信息化目标跟踪 2026-02-25 17:01:48在无人机摄像头的基础上加装慧视光电开发的Viztra-LE026图像处理板,这是一块轻型化、低功耗的图像处理板,用在无人机上面既不会过多占用空间,也不会过多消耗续航,通过目标识别算法的赋能,就可以针对像东北虎这样的动物AI自动识别,一旦识别到老虎的特征物体,无人机就能够立即锁定并抵近观察,为消防和公...
-
湖北目标跟踪生产企业 2026-02-25 11:01:43而维修机器人则能够通过图像识别、精细远程控制技术,实现远程快速维修,通过加装高性能图像处理板,机器人能够精细电网缺陷以及损坏程度,并通过摄像头实时回传高清画面,工程师只需要远程操控机器人进行修补,实现精细缝合。整个过程只需要极少数的人员参与,整个巡检维修的时间能够从7小时缩减到1小时,极大地保障了电...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
山东快速目标识别售价
2026-03-05 -

耐用图像处理板哪里好
2026-03-05 -

江西快速图像标注有哪些
2026-03-05 -
甘肃高效目标识别远程控制
2026-03-05 -

河南安全图像标注应用
2026-03-05 -
广东流畅目标识别定制
2026-03-05 -

江苏人防目标识别软件
2026-03-04 -

青海高效目标识别联系方式
2026-03-04 -

甘肃安保视频压缩与传输
2026-03-04