智能驾驶汽车电子测试模组需具备多传感器仿真能力,其视觉仿真模块可输出 LVDS 格式的虚拟摄像头信号,帧率达 60fps,分辨率支持 1920×1080;雷达仿真模块能生成点云数据,模拟不同距离、速度的目标物;激光雷达仿真则可提供百万点级的 3D 点云,模拟雨、雾等天气对传感器的影响。传感器数据同步精度控制在 1ms 以内,确保多传感器融合算法的测试有效性。通过与场景引擎(如 Prescan)对接,模组可复现海量真实交通场景,从各方面验证自动驾驶系统的感知与决策能力。汽车电子测试转接头的清洁度控制,防止杂质进入汽车电子接口造成损坏。上海耐用汽车电子测试系统
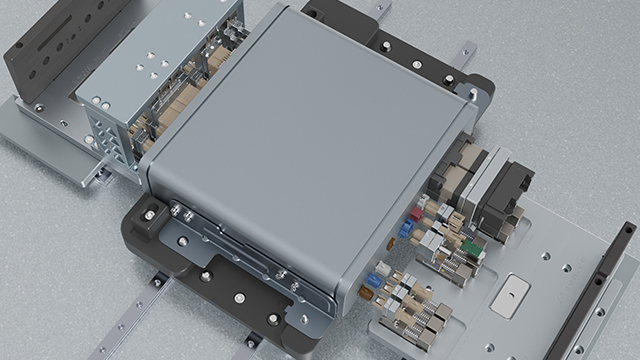
汽车电子测试模组的硬件设计需满足车规级环境要求,工作温度覆盖 - 40℃至 85℃,振动耐受达 10-2000Hz/10g 加速度。。关键处理单元多采用 ARM Cortex-A 系列处理器,主频不低于 1GHz,确保复杂测试算法的实时运行。信号调理模块采用高精度运放与滤波电路,将传感器输入的 mV 级信号放大至可采集范围,同时抑制共模干扰,信噪比优于 80dB。电源模块支持宽压输入(9-36V),兼容 12V/24V 车载电源系统,并具备过流、过压保护功能。这种硬件设计使测试模组既能在实验室稳定运行,也能部署于车辆实测试验中。浙江高直通率汽车电子测试解决方案新能源汽车电池包测试,虎连模组保障高压连接安全稳定。
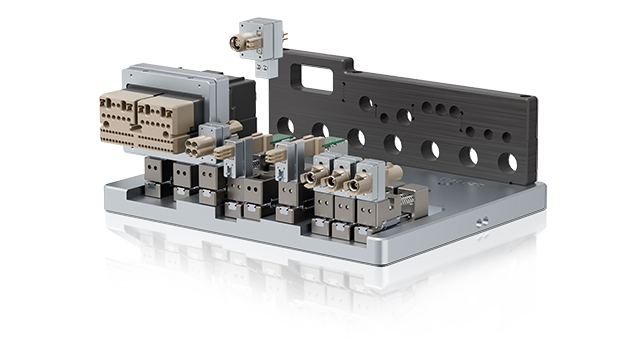
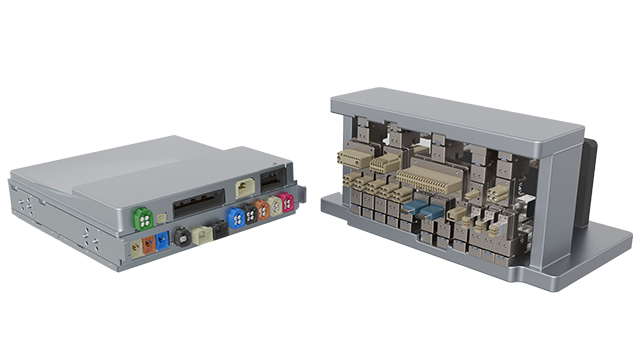
汽车电子测试模组的通信接口兼容性直接决定其应用范围,高级产品通常集成 CAN FD、LIN、Ethernet 等多种车载总线接口。CAN FD 接口支持 8Mbps 高速传输,可验证自动驾驶域控制器的实时通信性能;车载以太网接口符合 IEEE 802.3bw 标准,满足 100BASE-T1 的测试需求;LIN 接口则用于车身控制模块等低速网络的验证。接口转换模块实现不同总线协议间的透明转发,支持跨网络测试场景,如验证 CAN 与 Ethernet 之间的网关转发性能。这种多接口设计使模组能覆盖从传统汽车到智能网联汽车的全谱系电子系统测试。
汽车电子测试模组的传感器模拟精度直接影响测试结果的可信度,其温度传感器模拟器支持 - 40℃至 150℃范围,精度 ±0.5℃;压力传感器模拟器输出 0-5V/4-20mA 信号,对应 0-10bar 压力范围,线性度优于 0.1%;角度传感器模拟器可输出 0-360° 的 PWM 或正弦信号,分辨率 0.1°。传感器信号的动态响应时间小于 1ms,能模拟急加速、急减速等动态场景下的传感器输出特性。通过可编程的信号噪声与漂移参数,模组可验证 ECU 对传感器异常信号的处理能力。高压汽车电子测试转接头,专为新能源汽车电子高压系统测试设计,安全可靠。
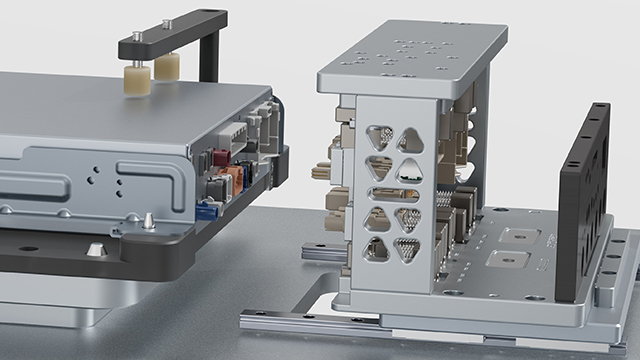
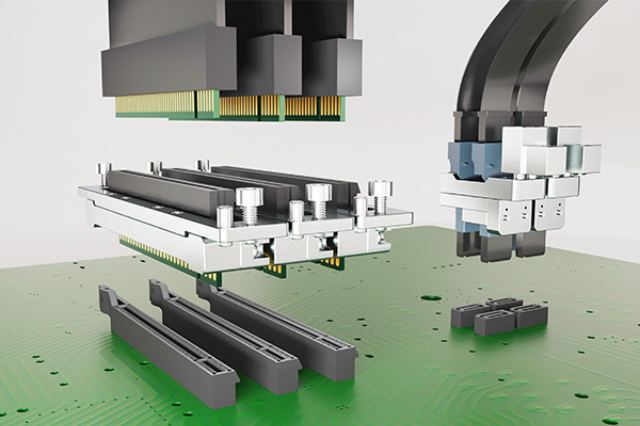
汽车电子测试模组的车规级接口设计确保与被测件的可靠连接,采用原厂规格的连接器(如 AMP、TE 等品牌),接触电阻小于 10mΩ。接口模块具备防误插设计,机械编码确保不同类型接口不会错配,避免损坏 ECU。弹性接触结构补偿插拔误差,单个接口的插拔寿命达 10,000 次以上。针对生产线测试场景,汽车电子测试模组的接口模块支持快速更换设计,更换时间小于 5 分钟,减少设备停机时间。接口的密封性达 IP6K9K 等级,适应生产车间的油污、水汽环境。汽车电子测试转接头的校准周期,需与汽车电子测试设备的校准同步进行。珠海节能型汽车电子自动化测试设备
耐高温汽车电子测试转接头,确保在发动机舱等恶劣环境下汽车电子测试可靠。上海耐用汽车电子测试系统
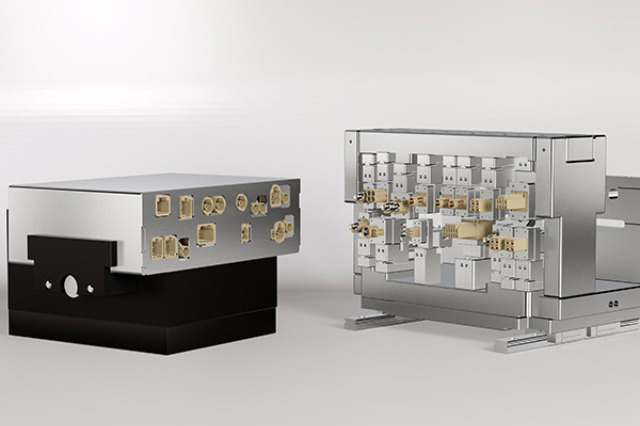
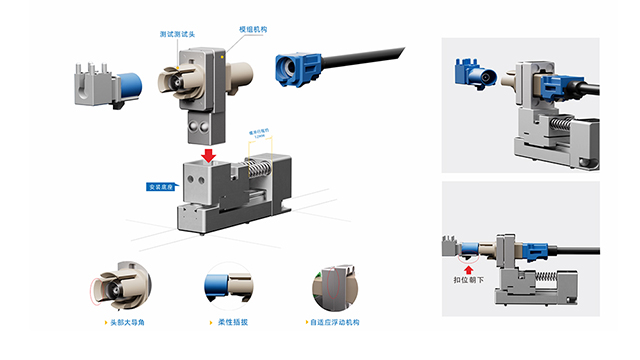
高精度汽车电子测试转接头是实现车载电子系统参数精确测量的基础。其阻抗匹配设计需与被测汽车电子部件的特性阻抗(通常为 50Ω 或 75Ω)保持一致,在 1MHz 至 1GHz 的频率范围内,反射损耗需优于 - 20dB,避免信号反射导致的测量误差。对于自动驾驶系统的毫米波雷达测试,专门的转接头需支持 77GHz 的高频信号传输,插入损耗控制在 0.5dB 以内,确保雷达信号的相位与幅度测量精度。在激光雷达(LiDAR)测试中,转接头的时延误差需小于 1ns,以满足距离测量的高精度要求,为汽车电子传感器的性能验证提供准确的连接通道。上海耐用汽车电子测试系统