在智慧停车领域,激光雷达能够辅助进行停车,检测车辆移动状态,控制车辆与物体之间的距离。在建模领域,激光雷达能够通过扫描获取物体的3D点云模型,例如城市建模,激光雷达系统能够提供高密度、高精度的三维数据,建筑物的三维重建比用传统方式更容易,也比手工处理更快,不要立体测量的方式获取高程信息。再例如森林检...
激光雷达基本参数
- 品牌
- 慧视科技
- 型号
- 可定制
激光雷达企业商机
机械旋转激光雷达是比较早的扫描方式,但由于零件多、寿命短、价格贵、 体积大,不适用于量产车辆。机械式激光雷达收发光源、接收器以及扫 描系统坐在圆盘底座上。随着外部电机的转动,收发架构会沿着这个圆 盘进行转动,实现水平空间的 360 度扫描。优点是外部电机控制技术比 较成熟且能够长时间保持稳定转速;缺点是体积大难以集成到车顶,且 激光雷达价格仍然过高而不符合大规模自动驾驶场景的需求。2005 年 Velodyne 创始人 David Hall 发明了 3D 实时激光雷达,2007 年率先实现量产,推出商用量产实时 3D 雷达,在早期获得多家无人驾驶 公司的青睐。激光雷达的波长比微波短好几个数量级,又有更窄的波束。昆明三维激光雷达扫描

激光雷达的内参标定指的是激光雷达内部发射器坐标和雷达自身坐标的转换关系,这一标定工作在激光雷达出厂前就已经完成。激光雷达的外参标定则主要通过采集多个点在激光雷达与现实世界坐标,来求解系列方程,从而求出俯仰角、横滚角、航像角、纵向位移等外部参数。传感器的标定除了要进行各传感器自身的标定之外,还要进行相机之间的标定、激光雷达和激光雷达之间的标定、激光雷达与惯性导航单元(IMU)的标定、以及相机和激光雷达的联合标定等标定工作,然后实现多个传感器坐标的统一。昆明三维激光雷达扫描差分激光雷达的测试原理是使用激光雷达发出两种不等的光。

据有关媒体报道,2022年下半年,中国市场正迎来一波新的智能车量产交付小高潮。高工智能汽车研究院监测数据显示,去年中国市场乘用车前装标配搭载激光雷达数量还不到8000颗,今年1-9月,前装搭载激光雷达的数量已达5.7万颗,预计全年达12万颗,增长10倍以上。随着乘用车逐步发展到L3+阶段,“视觉计算”方案不再满足智能驾驶的感知要求,乘用车市场在2022迎来激光雷达装车小高潮。众多信息都显示2022年将是激光雷达大规模“上车年”。
棱镜扫描采用2-3块棱镜控制激光雷达扫描非重复性的方向,典型特征是输出的图像中间会比周边的扫描密度大一些。在时间充裕下可扫描整个视场。棱镜主要优点是透光性较好,不需要太多激光器、收发器,能够降低成本。同时组件可以固定,可靠性更高。棱镜方案劣势在于中心和四周的扫描区域均匀性存在差异,且成像范围不一致会导致激光雷达在高速移动过程中出现成像不连续的情况,需要后期算法补偿。基于以上特征,棱镜方案更适合扫描精度要求高、时效要求低的应用场景。激光雷达的接收单元由接收光学系统、光电探测器和回波检测处理电路等组成。

L2自动辅助驾驶通常采用摄像头与毫米波雷达融合。L1、L2级车辆通常具有一个前置远程雷达和一个用于自适应巡航控制、紧急制动辅助和车道偏离警告/辅助的摄像头,两个后向中距雷达实现盲点检测,以及4个额外摄像头和12个超声波传感器可实现360度视野实现泊车辅助功能。L2+是从辅助驾驶走向更高级别自动驾驶的必经之路。具体来说,激光雷达也需要时间收集数据并更新软件调整优化,并不是自动驾驶的灵丹妙药,但由于其在不同光照条件下精细的探测能力可以降低算法难度而受到欢迎。机械扫描能够进行大视场扫描,也可以达到很高的扫描速率。昆明三维激光雷达扫描
差分激光雷达主要用于大气成分的测定。昆明三维激光雷达扫描
随着科技的快速发展,汽车驾驶也越来越往智能化和自动化的方向发展,现在很多车企都在研发自动驾驶汽车。自动驾驶可以解放驾驶者的双手双脚,也能减少因疲劳驾驶、酒后驾驶引发的的车祸。对于自动驾驶汽车的安全性,外界一直存在着一些担忧。据了解,研究人员发现激光可以让自动驾驶汽车失明,看不到移动的行人和其它障碍物,并认为道路是安全的,可以继续行驶。激光雷达的工作原理就是发射激光并捕获反射来计算距离,就如同蝙蝠的回声定位一样,但如果有人用激光模拟这种反射,让激光雷达误以为是反射回来的激光,这就会扰乱传感器,忽略来自真正障碍物的激光反射。昆明三维激光雷达扫描
成都慧视光电技术有限公司依托可靠的品质,旗下品牌慧视科技以高质量的服务获得广大受众的青睐。是具有一定实力的通信产品企业之一,主要提供电子元器件,光电子器件,通讯设备,仪器仪表等领域内的产品或服务。随着我们的业务不断扩展,从电子元器件,光电子器件,通讯设备,仪器仪表等到众多其他领域,已经逐步成长为一个独特,且具有活力与创新的企业。值得一提的是,慧视光电致力于为用户带去更为定向、专业的通信产品一体化解决方案,在有效降低用户成本的同时,更能凭借科学的技术让用户极大限度地挖掘慧视科技的应用潜能。
与激光雷达相关的文章
西藏汽车激光雷达测量
- 成都3D激光雷达避障 2024-04-19
- 车载激光雷达测绘 2024-04-19
- 重庆地面激光雷达技术 2024-04-19
- 贵州激光雷达测距 2024-04-19
- 四川毫米波激光激光雷达公司 2024-04-19
- 贵州轨道交通激光雷达标定 2024-04-18
- 气溶胶激光雷达扫描 2024-04-18
- 四川mems激光雷达 2024-04-18
- 贵阳固态激光雷达数据处理 2024-04-18
- 重庆sick激光雷达价格 2024-04-17
- 四川高帧率 激光雷达生产商 2024-04-17
- 云南防撞激光雷达产品 2024-04-17
与激光雷达相关的产品



与激光雷达相关的新闻
-
轨道交通激光雷达市场 2024-04-17 09:11:36Three.js在Web端显示点云的好处: 可视化分析:点云包含大量的离散点,可能包含空间中的对象、物体或传感器采集的数据。通过使用Three.js,可以以交互式的方式旋转、缩放和平移点云,从不同角度和尺度观察数据,帮助用户更好地理解和分析数据。 跨平台和无需插件:Three.js基...
-
云南机载激光雷达扫描仪 2024-04-17 00:13:49随着自动驾驶汽车研发的不断深入,自动驾驶的等级也在不断提升,在自动驾驶L2向L3甚至L4的转变当中,对自动驾驶感知系统和车载传感器的要求也越来越高。在L3级别自动驾驶中的关键硬件中,激光雷达被众多车企视为现阶段实现自动驾驶的比较高阶硬件。同摄像头、毫米波雷达、红外热成像一样,激光雷达也属于汽车感知周...
-
成都一体式激光雷达生产商 2024-04-16 22:02:23将单站扫描扩展为整体扫描,将地表上的点、线、面体、地表三维模型等几何数据快速重构出来,可对调查对象的整体变化、细节特征进行详细了解。这种从多方位、多角度地对所测物体进行数据采集获取更多三维信息,建立的三维可视化数据能够更加真实地反映地理位置、外观、高度等属性特征。成都慧视光电技术有限公司研发的HSL...
-
昆明sick激光雷达避障 2024-04-16 22:02:23激光雷达有助于自适应巡航控制、盲点监控、车道保持、紧急制动和行人检测等功能活动。但是,与任何技术一样,激光雷达也在不断发展。激光雷达创建智能响应交通流激光雷达不仅可以帮助车辆实时感受和体验道路,还可以帮助车辆与交通监控等其他基础设施之间的通信。具体来说,基于激光雷达的交通监控可以实时识别接近红绿灯的...
与激光雷达相关的问题
新闻资讯
产品推荐
-
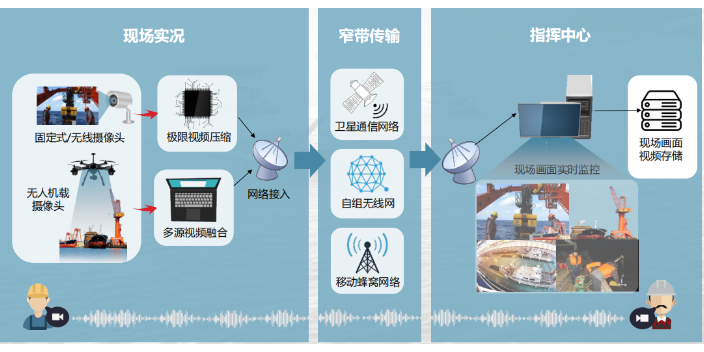
安徽视频压缩与传输交互系统
2026-05-02 -

河南开放AI智能服务商
2026-05-02 -

天津企业目标识别工具
2026-05-02 -

云南实时可视化视频产品是什么
2026-05-02 -
吉林专业目标识别售价
2026-05-02 -

四川电力运维视频压缩与传输山区
2026-05-02 -

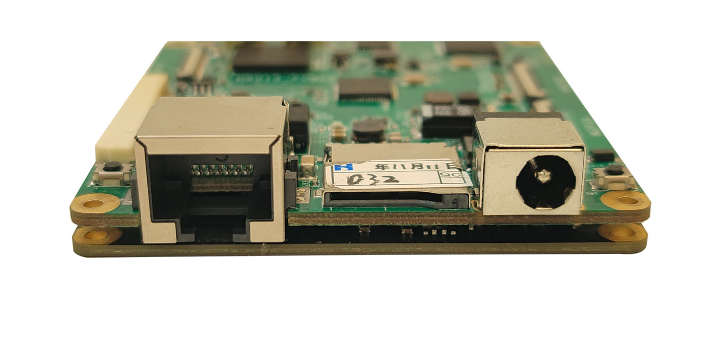
工业图像处理板应用
2026-05-02 -

陕西无源目标识别系统
2026-05-02 -

安徽电力运维视频压缩与传输高清
2026-05-02