多路视频拼接360全景影像系统在建筑工地安全管理上的应用效果,具体体现在以下几个方面:、***无死角监控通过布置多个摄像头并进行视频拼接,系统能够生成工地的360度全景图像,实现***无死角的监控。这意味着管理者可以随时查看工地的各个角落,无论是高处作业、深基坑施工还是材料堆放区,都能够一目了然,确保工地安全无虞。实时性与G效性系统能够实时传输和显示拼接后的全景图像,确保管理者能够***时间掌握工地的安全状况。与传统的巡检方式相比,全景影像系统**提高了监控的实时性和G效性,节省了人力和时间成本。安全隐F及时发现与处理通过全景影像系统,管理者可以及时发现工地上的安全隐F,如违规操作、未佩戴安全帽、临边防护不到位等。一旦发现这些问题,管理者可以迅速采取措施进行处理,从而避免安全事G的发生。历史数据回溯与分析全景影像系统不仅提供实时监控功能,还能够保存历史数据。管理者可以通过回放和分析历史数据,了解工地安全状况的变化趋势,找出潜在的安全F险,并制定相应的Y防措施。提升应急响应能力在发生安全事G时。 河北车辆多路视频拼接系统厂家供应多路视频拼接360全景影像系统在油田开采中的应用。

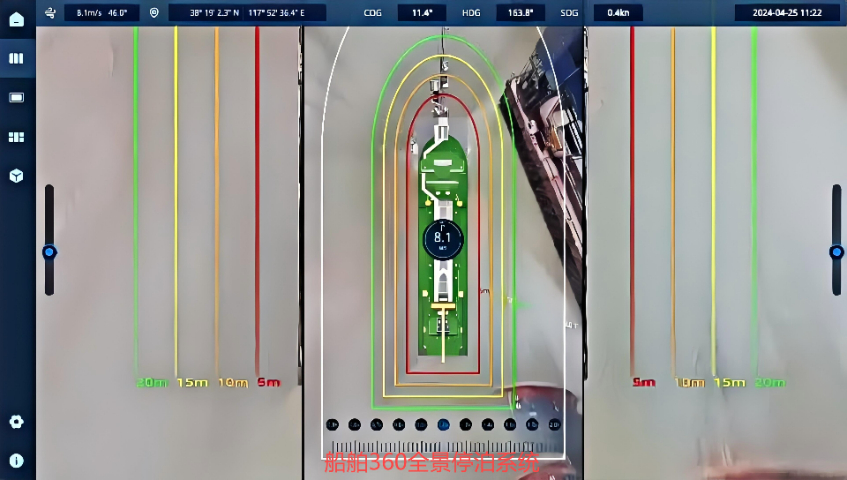
系游艇中的多路视频拼接360全景影像系统如何实现?系统集成与控制h,需要将所有硬件和软件组件集成到一个统一的系统中,并通过用户界面进行控制。系统集成应确保各个组件之间的兼容性和稳定性。用户界面应简洁、直观,方便船长和船员操作。附加功能实现除了基本的全景监控功能外,还可以根据需求添加其他功能,如夜视增强、运动检测与报警、航行轨迹记录等。这些功能可以通过扩展硬件和软件模块来实现。测试与优化在实现过程中,需要对系统进行全m的测试和优化,以确保其在各种条件下都能正常工作并达到预期效果。测试应包括功能测试、性能测试和稳定性测试等方面。总之,游艇中的多路视频拼接360全景影像系统实现涉及多个技术领域,包括摄像头技术、数字图像处理、实时传输与显示以及系统集成与控制等。通过合理选择硬件和软件组件并优化算法设计,可以构建出一个高效、稳定且易于使用的全景监控系统。
多路视频拼接360全景影像技术路径主要包括以下几个步骤:视频采集:使用多个摄像头同时采集不同角度的视频画面,确保每个摄像头都能覆盖到需要监控的区域。这些摄像头通常会安装在不同的位置,以获取Q方位的视角。视频预处理:对采集到的视频进行预处理,包括去噪、增强、校正等操作,以提高视频的质量和清晰度。这一步骤对于后续的图像拼接至关重要。图像配准:将不同摄像头采集到的图像进行配准,即确定它们之间的相对位置和角度关系。这可以通过特征点匹配、图像变换等方法实现。图像融合:将配准后的图像进行融合,以生成一个完整的全景图像。融合过程中需要考虑图像之间的重叠区域、亮度差异、色彩差异等因素,以确保融合后的图像自然、连贯。全景图像输出:将融合后的全景图像输出到显示设备或存储设备中,供用户查看或使用。在实现多路视频拼接360全景影像技术时,还需要考虑一些关键因素,如摄像头的选型与布局、图像处理的算法优化、系统的实时性与稳定性等。此外,随着技术的不断发展,深度学习、计算机视觉等新技术也可以应用于全景影像的拼接与处理中,进一步提高系统的性能和效果。 车侣多路视频拼接系统在工矿领域的应用。

安装超长平板车多路视频拼接360全景影像系统在难度如下:复杂的布线:由于需要安装多个摄像头和其他相关设备,布线工作变得相当复杂。需要确保所有线路都正确连接,并且要避免线路之间的干扰。精确的摄像头定W:摄像头的安装位置需要精确确定,以确保它们能够捕捉到车辆周围的所有关键区域。这需要对车辆结构和摄像头视场角有深入的了解。高质量的图像处理:10路摄像头的图像需要无缝拼接,这对图像处理算法和硬件性能有较高要求。同时,还需要进行色彩校正、畸变校正等处理,以确保终的全景图像质量。稳定的系统集成:将多个组件集成到一个系统中,需要确保它们之间的兼容性和稳定性。这需要对各个组件的特性和性能有深入的了解,并进行充分的测试和调整。严格的安装工艺:由于超长平板车的体积和重量,安装过程中需要特别注意安装工艺和固定方式,以确保摄像头和相关设备在行驶过程中不会脱落或损坏。后期的调试和优化:安装超长平板车360全景影像系统,还需要进行细致的调试和优化工作,以确保系统能够正常工作并达到ZJ性能。这可能需要多次的试验和调整。综上所述,安装超长平板车多路视频拼接360全景影像系统。多路视频拼接360全景影像系统有哪些具体的应用领域?广西机车多路视频拼接系统联系方式
车侣多路视频拼接系统应用的领域有哪些?河南叉车多路视频拼接系统方案商
多路视频拼接360全景影像系统在无人驾驶矿卡上的应用效果主要体现系统,可以识别道路上的障碍物、交通标志和路况信息,并基于这些信息做出智能的导航决策。这有助于优化车辆行驶路径,提高运输效率,并减少不必要的能源消耗。5.远程监控和操作:360全景影像系统可以通过网络将实时的环境影像传输给远程操作人员,使他们能够随时随地监控车辆的运行状态和周围环境。这种远程监控和操作的能力对于远程维护、故障排查和紧急情况的响应非常重要。6.数据收集与分析:360全景影像系统可以提供大量的环境数据,如道路状况、交通流量、天气等。这些数据可以被用于分析和优化矿卡的运行策略,提高矿卡的效率和安全性。同时,这些数据还可以用于训练机器学习模型,提升无人驾驶矿卡的自动驾驶能力。综上所述,360全景影像系统在无人驾驶矿卡上的应用效果可以提高车辆的环境感知能力、安全性和操作便捷性,同时还能实现智能导航、远程监控、数据收集与分析等功能,为无人驾驶矿卡的运行和管理带来了许多便利和优化的机会。河南叉车多路视频拼接系统方案商