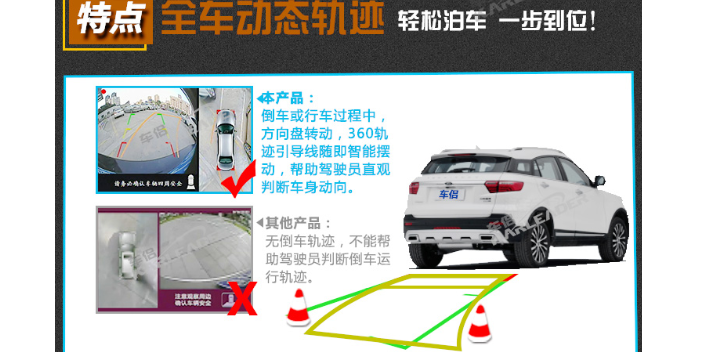
360度全景倒车影像,是一套通过车载显示屏幕观看汽车四周360度全景融合,超宽视角,无缝拼接的适时图像信息(鸟瞰图像),了解车辆周边视线盲区,帮助汽车驾驶员更为直观、更为安全地停泊车辆的泊车辅助系统,又叫全景泊车影像系统或全景停车影像系统(有别于市面上把汽车四周画面在显示屏幕上进行分割显示的“全景”系统)。有的地方也称全车可视系统、全景可视系统、全景泊车系统、360度全车可视系统,它是后视倒车影像系统的升级换代产品,是真正意义上的“全景倒车影像系统”。360度全车影像的组成:一般来说全景影像共有前后左右4个摄像头。汽车360全景影像设备公司
360°全景记录仪有没有必要安装?既然叫行车记录仪,那么录像功能是必不可少的。可设置在车辆启动后,360全景影像可自己开始工作,也可在行车过程中自己启动。与普通记录仪不同之处,就在于它能记录四周所有情况,除非从天而降、车底破土而出,不然都难逃它的四只眼睛。碰瓷什么的,除非演技逆天(有这演技不去当演员还碰什么瓷),不然别想讹我。还有追尾啊剐蹭啊之类的事故,只要不是你的责任,它都能让你免责。停车监控:顾名思义,停车熄火之后可以继续录像,不用震动触发。配合无光夜视,晚上停车也不怕被剐蹭被砸玻璃了。而且它是通过汽车电瓶取电,不怕没电,不过当车辆电压低于11.6伏时会停止工作,避免汽车没电无法正常启动。压裂车360全景影像系统加装汽车360全景的选购,智能显示不抢屏。

4G360全景影像的远程监控管理是如何实现的?
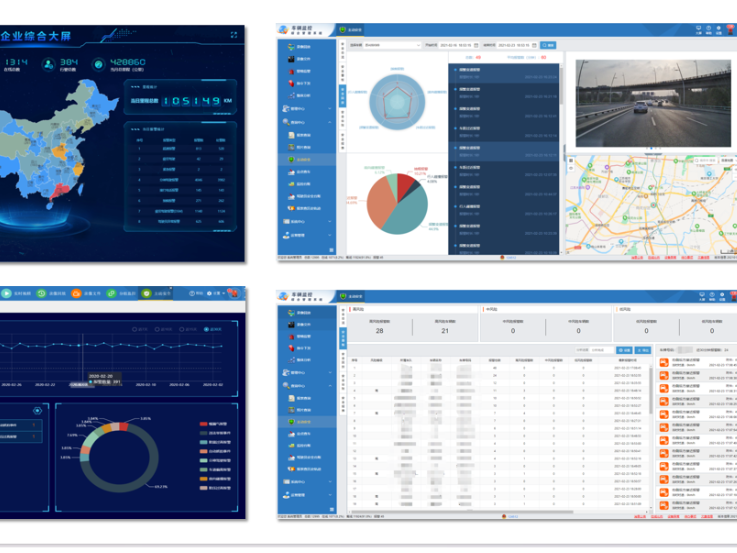
一、硬件组成超广角摄像头:安装在车辆周围的多个超广角摄像头,实时采集车辆四周的影像。摄像头具备高清晰度和广视角,能捕捉到车辆周围的全部信息。采集到的影像数据被传输到图像处理单元,对影像进行矫正、拼接和优化处理,以形成无缝完整的全景鸟瞰图。处理后的全景影像数据通过内置的4G通信模块传输到远程监控中心或车主的手机APP上。4G网络的高速性和稳定性确保了影像数据的实时传输。
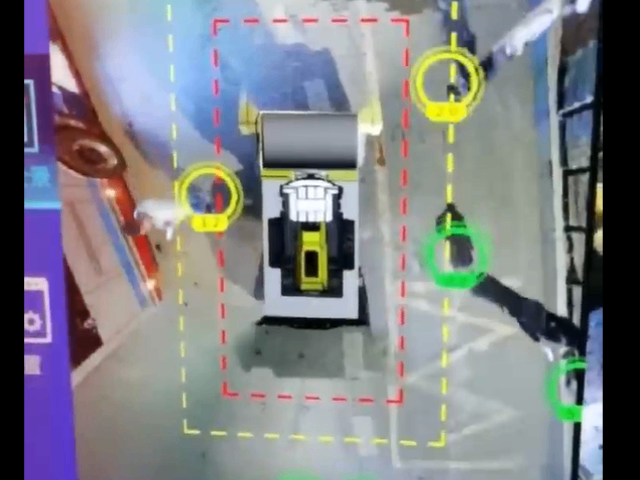
二、软件与算法图像处理算法:利用图像处理算法对采集到的影像进行矫正和拼接,消除畸变和接缝,形成高质量的全景图像。通过内置的智能算法对影像进行实时分析,当检测到异常情况(如行人、障碍物等)时,及时发出预警信号。
三、工作流程
图像处理单元对采集到的影像进行矫正、拼接和优化处理,形成全景图像。处理后的全景影像数据通过4G通信模块实时传输到远程监控中心或车主的手机APP上。车主或管理人员通过远程监控软件查看车辆周围的实时情况,并进行相应的管理和控制操作。
综上所述,4G360全景影像的远程监控管理是通过硬件组成、软件与算法以及工作流程的协同工作来实现的。
全景可视系统和360全景可视系统的区别是什么?全景可视系统:被客户称为车载多画面显示录像系统、全景可视系统、360度全车可视系统或倒车后视系统,它是由摄像机、视频分割控制主机和录像存储三大部分组成,是指在汽车的前后左右等周边都分别安装一个或多个汽车摄像头,并使用画面分割主机将多个摄像机画面合并处理后,在同一个液晶屏上实时显示汽车周边的影像并实时D1高清监控录像。360全景可视系统:360度全景可视系统主要针对驾驶安全的一套影像设备,通过安装在车前、后、左、右四个超广角摄像头,采集车辆四围影像,经过图片处理和无缝隙拼接后,形成一幅车辆四围360度全景俯视图,使驾驶员坐在车中即可直观地看到车辆所处的位置并及时观察到周围障碍物,真正做到从容操控车辆泊车或通过复杂路面,有效减少刮蹭,碰撞及陷落等事故发生。车侣360全景影像与北斗主动安全的融合作用。

360度全景泊车影像系统(又名AVM全景式监控影像系统,360度全景摄像头、360度全景影像系统、360度全景泊车系统、360度全景可视系统、360度全景倒车环视系统),通过安装在车身前后左右的4个超广角摄像头同时采集车辆四周的影像,经过“实时图像畸变还原对接技术”对图像进行畸变还原—视角转化—图像拼接—图像增强等处理,较终形成一幅无缝完整的车周全景鸟瞰图。该系统不但可以显示全景图,还可同时显示任一方向的单视图;驾驶员通过配合标尺线能够准确读出障碍物的位置和距离。车侣360全景影像与超声波雷达的融合作用。挖掘机360全景可视系统销售
360全景顾名思义就是给人以三维立体感觉的实景360度的图像。汽车360全景影像设备公司
(下篇)车载AI360全景影像系统的技术原理: AI算法通过深度学习等技术对图像中的目标进行特征提取和识别,能够准确地识别出车辆周围的行人、车辆、障碍物等物体。物体识别精度:AI算法通过不断优化和训练,提高物体识别的精度和鲁棒性。它能够应对不同光照条件、遮挡情况、复杂背景等挑战,确保识别的准确性和可靠性。四、预警机制设计预警触发条件:当AI算法识别到潜在的危险源时,如行人、车辆等物体靠近车辆到一定距离时,系统会触发预警机制。预警方式:预警方式可以包括声光预警、语音提示等。系统会通过车载显示屏、扬声器等设备向驾驶员发出预警信号,提醒驾驶员注意潜在的危险。五、系统稳定性与可靠性抗干扰能力:车载环境复杂多变,系统需要具备较强的抗干扰能力,以应对电磁干扰、振动、温度变化等不利因素的影响。故障自诊断与恢复:系统应具备故障自诊断与恢复能力,能够在发生故障时及时报警并尝试恢复正常运行,确保行车安全。综上所述,车载AI360全景影像系统的技术原理,通过集成AI算法实现预警与物体识别功能的技术原理是一个复杂而精细的过程。它涉及到图像采集与传输、图像拼接与融合、AI算法集成与物体识别以及预警机制设计等多个方面。 汽车360全景影像设备公司