(下篇)自带算法的疲劳驾驶预警系统是基于机器视觉技术和先进的神经网络人工智能视觉算法开发的驾驶辅助预警产品。以下是对其主要特征及安装应用的详细介绍:
二、安装应用适用范围:该系统适用于多种类型的车辆,包括长途客/货运车、危险品运输车辆、校车、出租车、公交车和家用轿车等。安装位置:通常将体积较小的摄像头安装在驾驶室内驾驶员前方,以便准确捕捉驾驶员的面部特征和动作。应用效果:通过实时监测和预警,有效减少因疲劳驾驶导致的交通事故,保障行车安全。提高管理效率,后台远程监控管理系统能够实时查看车辆和驾驶员状态,便于管理人员进行实时监控和数据分析。降低运营成本,通过减少事故发生率,降低因事故导致的车辆维修和人员医疗费用等成本支出。增强驾驶员安全意识,持续的预警提示和远程监控有助于增强驾驶员的安全意识,促使其自觉遵守安全驾驶规范。
综上所述,自带算法的疲劳驾驶预警系统具有智能识别与分析、全天候工作能力、非接触式测试、多功能预警和远程监控与管理等主要特征。其广FAN的适用范围和明显的应用效果使其成为提高行车安全性和管理效率的重要工具。 DSM-7疲劳驾驶预警系统主机是疲劳驾驶预警系统的核XIN处理单元,负责运行算法,分析数据并发出预警.辽宁工矿车疲劳驾驶预警系统
(上篇)车载自带算法的疲劳驾驶预警集成MDVR实现云台管理的原理
车载疲劳驾驶预警系统与MDVR(MobileDigitalVideoRecorder,移动数字视频录像机)集成,结合云台管理,可以实现对驾驶员状态的实时监控、数据存储和远程管理。以下是其工作原理和实现细节:
1.系统架构集成MDVR的疲劳驾驶预警系统主要包括以下模块:
-摄像头模块:用于采集驾驶员面部图像和车内环境视频。
-云台控制模块:调整摄像头角度,确保ZUI佳监控范围。
-MDVR模块:负责视频录制、存储和传输。-疲劳检测算法模块:实时分析驾驶员状态,判断是否疲劳。
-通信模块:实现车载设备与云平台的数据传输。
-云平台:用于远程管理、数据分析和预警通知。
2.工作原理
2.1数据采集-摄像头采集:-摄像头实时捕捉驾驶员面部图像,用于疲劳检测。-同时录制车内环境视频,存储到MDVR中。-传感器数据:-结合方向盘传感器、车速传感器等,提供辅助判断数据。
2.2疲劳检测算法-实时分析:-车载终端运行轻量化的疲劳检测算法,分析摄像头采集的图像。-检测指标包括闭眼频率、打哈欠次数、头部姿态等。-多模态融合:-结合传感器数据(如方向盘转动频率、车速变化),提高检测准确性。 中国香港雅阁司机行为检测预警系统车侣DSMS疲劳驾驶预警系统可以对接的平台协议有哪些?

计算疲劳驾驶预警系统的准确率通常涉及对系统预测结果的评估。准确率是衡量一个分类系统性能的重要指标,它表示系统正确预测的样本数占总样本数的比例。在疲劳驾驶预警系统的上下文中,准确率可以通过以下公式计算:准确率(Accuracy)=TP+TN+FP+FNTP+TN其中:TP(TruePositives):系统正确预测为疲劳驾驶的样本数。TN(TrueNegatives):系统正确预测为非疲劳驾驶的样本数。FP(FalsePositives):系统错误预测为疲劳驾驶的样本数(实际上是非疲劳驾驶)。FN(FalseNegatives):系统错误预测为非疲劳驾驶的样本数(实际上是疲劳驾驶)。要计算准确率,你需要有一个标注好的测试数据集,其中包含每个样本的真实标签(疲劳驾驶或非疲劳驾驶)以及系统的预测标签。然后,你可以通过比较真实标签和预测标签来统计TP、TN、FP和FN的数量,并使用上述公式计算准确率。需要注意的是,准确率并不是评估分类系统性能的w一指标。其他常用的指标还包括查准率(Precision)和查全率(Recall),它们可以提供更全M的性能评估。在疲劳驾驶预警系统中,这些指标的具体定义和计算方法可能会根据具体的应用场景和需求而有所不同。
(篇二)DSM-7疲劳驾驶预警系统是一种重要的汽车安全辅助系统,它通过监测驾驶员的生理反应和驾驶行为来判断驾驶员是否处于疲劳状态,并及时发出预警,以减少因疲劳驾驶引发的交通事故。PCI盒子作为疲劳驾驶预警系统的一部分,通常用于连接外WEI设备和主机,实现数据的采集、处理和传输。以下是对PCI盒子外WEI设备连接主机、振动器、CAN线、视频输出和232串口线的详细阐述:
3.CAN线连接功能:CAN(ControllerAreaNetwork)线是一种用于连接汽车内部各电子控制单元(ECU)的串行通信协议。在疲劳驾驶预警系统中,CAN线可以用于实现系统与车辆其他系统(如发动机控制系统、刹车系统等)之间的通信和数据交换。CAN线通常通过专YONG的CAN接口连接到PCI盒子或系统的其他通信模块上。这些接口符合CAN协议标准,能够确保数据的可靠传输和系统的稳定运行。
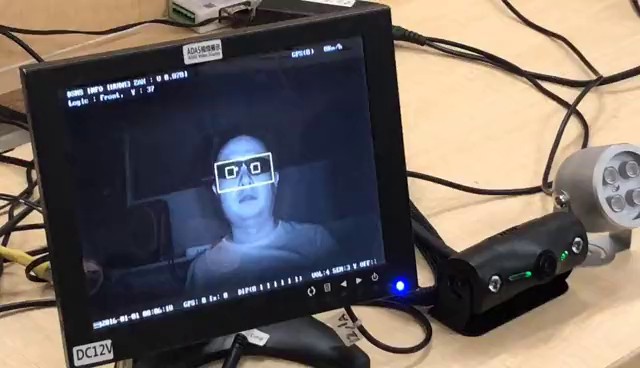
4.视频输出功能:视频输出是疲劳驾驶预警系统的一种重要功能,用于显示驾驶员的实时视频画面、预警信息或系统状态等。这有助于驾驶员直观地了解自身状态和系统的工作情况。连接方式:视频输出通常通过视频接口(如HDMI、VGA等)连接到显示器或触摸屏等显示设备上。这些接口能够提供高质量的视频信号,确保画面的清晰度和稳定性。 当系统检测到驾驶员处于疲劳状态时,会立即通过方向盘振动器和座椅振动器向驾驶员发出预警信号.

(专辑一)自带算法的疲劳驾驶预警系统实现自带身份识别功能,主要依赖于多种技术和方法的综合应用。这些技术包括但不限于生物识别技术、图像处理技术、机器学习算法以及传感器技术等。以下是实现这一功能的具体步骤和关键技术点:
1. 生物识别技术的应用人脸识别:疲劳驾驶预警系统可以通过内置的摄像头捕捉驾驶员的面部图像。利用先进的人脸识别算法,系统能够实时分析驾驶员的面部特征,包括眼睛状态、表情变化等,以判断其是否处于疲劳状态。同时,人脸识别技术也可以用于身份识别,通过比对驾驶员的面部特征与预设的数据库中的信息,确认驾驶员的身份。其他生物特征识别:虽然人脸识别是最常见的生物识别方式,但也可以根据需求采用其他生物特征识别技术,如指纹识别、虹膜识别等,以提高身份识别的准确性和安全性。
2. 图像处理与机器学习算法系统通过摄像头获取的图像,需要经过图像处理技术的处理,如图像增强、去噪、边缘检测等,以提高后续分析的准确性。利用机器学习算法,系统可以自动学习并识别驾驶员的疲劳特征,如频繁打哈欠、闭眼时间过长等。在身份识别方面,机器学习算法可以通过训练大量的数据样本,提高人脸识别的准确率和鲁棒性。
疲劳驾驶预警系统的准确率如何提升?辽宁工矿车疲劳驾驶预警系统
疲劳驾驶预警疲劳特征分析:驾驶员的眼部特征,如瞳孔直径,眼睑运动频率和幅度,眨眼频率等,以此评估疲劳程度.辽宁工矿车疲劳驾驶预警系统
(篇三)DSM-7疲劳驾驶预警系统是一种重要的汽车安全辅助系统,它通过监测驾驶员的生理反应和驾驶行为来判断驾驶员是否处于疲劳状态,并及时发出预警,以减少因疲劳驾驶引发的交通事故。PCI盒子作为疲劳驾驶预警系统的一部分,通常用于连接外WEI设备和主机,实现数据的采集、处理和传输。以下是对PCI盒子外WEI设备连接主机、振动器、CAN线、视频输出和232串口线的详细阐述:
5.232串口线连接功能:232串口线是一种用于连接计算机和外部设备(如打印机、调制解调器等)的串行通信接口。在疲劳驾驶预警系统中,232串口线可以用于实现系统与外部设备之间的数据通信和指令传输。连接方式:232串口线通常通过专YONG的串口接口连接到PCI盒子或系统的其他通信模块上。这些接口符合RS-232标准,能够确保数据的可靠传输和系统的稳定运行。随着技术的发展和进步,一些现代系统可能采用更先进的通信协议和接口(如USB、以太网等)来替代传统的232串口线连接。
综上所述,疲劳驾驶预警系统的PCI盒子通过连接主机、振动器、CAN线、视频输出和232串口线等外WEI设备,实现了数据的采集、处理和传输以及预警信息的输出和显示。这些连接方式和功能共同构成了疲劳驾驶预警系统的核XIN组成部分。 辽宁工矿车疲劳驾驶预警系统