- 品牌
- 佳控科技
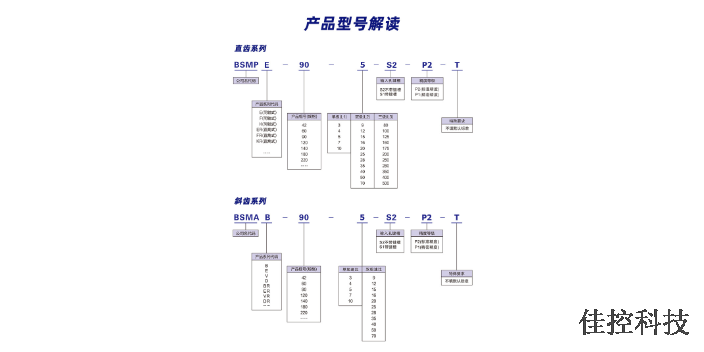
- 型号
- --
- 类型
- 齿轮-蜗杆减速器,蜗杆减速器,摆线减速器,摆线针轮减速器,行星齿轮减速器,圆柱齿轮减速器,无级减速器,谐波减速器
- 载荷状态
- 均匀载荷,强冲击载荷
今工业机器人的先进程度让人叹为观止,尤其是那些灵动的5轴、6轴机器人,具有如此多的关节,还能够做到运动和指令的精确传输,各部位紧密配合完成复杂的工作,让人不禁好奇它们的传动系统到底是怎样的???真正的工业机器人关节到底是什么结构的呢?说起关节,主要是指工业机器人重要的基础部件,也是运动的部件:精密减速机。这是一种精密的动力传达机构,其利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降低转速,增加转矩。减速机广泛应用于各种工业领域,如制造业、能源、交通等。K系列螺旋锥齿轮减速机哪个好
行星减速机因为结构原因,单级减速**小为2.8,比较大一般不超过12.5,常见减速比为:3/4/5/6/8/10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速。相对其他减速机,行星减速机具有高刚性、高精度(单级可做到1分以内)、高传动效率(单级在97%-98%)、高的扭矩/体积比、终身免维护等特点。因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量。行星减速机额定输入转速比较高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度。精密行星减速机因搭配伺服电机所以背隙等级(弧分)相当重要,不同背隙等级价格差异相当大,行星减速机可做多齿箱连结比较高减速比达100000。静安区K系列螺旋锥齿轮减速机减速电机的安装基础应为强度、刚度可靠、减振、抗扭的底座、台架等到支撑结构上,而且基础必须干燥。
行星减速器的使用条件: 1.行星减速器允许连续工作,同时允许正反两个方向同时工作。 2.输入轴的额定转速为1500转/分。当输入功率大于18.5千瓦时,建议使用960转/分的6极电机。 3.行星减速器的工作位置为水平位置。水平倾斜角小于15°,不得超过安装。水平倾斜角超过15°采取其他措施,确保润滑充足,防止漏油。 4.行星减速器的输出轴不能承受较大的轴向力和径向力,必须采取相应的措施。
行星减速机原理精密,混合驱动设备是一种高精度设备,提高行星减速机的工作精度至关重要。但由于工作设备的限制,制造精度的提高有限,成本会增加很多。在内磨头(电主轴)中,已经采用了向径向推力球轴承施加预紧力来提高精度的方法。现在把这个原理应用到行星减速机上,通过偏心行星轴对啮合齿面施加预紧力来提高传动精度。根据行星减速机混合驱动系统的特点,采用行星传动作为减速机混合驱动系统速度合成的新方法,并详细介绍了其结构设计、受力分析、功率分配和安装方法。实践证明,它具有线性增量简单、综合精度高的优点。利用偏心行星轴在对称行星减速机的啮合齿面间产生预紧力的方法,可以提高传动精度,降低系统成本,行星轴偏心量的计算值可以很好地保证齿间侧隙的消除。通过减速机,我们可以有效地控制机械设备的运行速度。

寡头垄断的日本企业脱颖而出工业机器人市场的发展带来了机器人减速器市场需求的增长,但从全球市场竞争格局来看,日本企业已经控制了80%以上市场份额可谓是机器人减速器领域的霸主,纳博茨克的市场份额已经达到60%左右。2、追赶国内企业虽然研发d加速起步较晚,国内机器人减速器制造商也加大了研发力度d近年来的努力,取得了一些进展发展较好的企业主要有秦川机床、力克精密、双环驱动等,但总体来看,国内企业的机器人减速器量产之路还有待观察,这除了取决于自身的规划发展和技术突破外,还有赖于国内机器人企业未来的发展。在自动化设备中,减速机的稳定性和效率至关重要。金山区现代化减速机供应商
尽量选用接近理想减速比: 减速比=伺服马达转速/减速机出力轴转速。K系列螺旋锥齿轮减速机哪个好
这是比较直观,但是比较少人关注的一个点。其实发热也是上面讲的精度有关。减速机精度取决于齿轮的啮合程度,啮合间隙过大,减速机的精度就差,而采用微过盈的方式,精度就会提高,但是就会导致发热过大的问题。RV上,采用帝人结构的发热的区别还没有那么明显,而同样是谐波减速机,不同品牌的发热程度就差很多了。别的不说,谐波里面,HD是一家可以既可以精度高又可以发热少的厂家。大佬的称号绝不是浪得虚名。当然,发热除了与齿轮有关之外,还跟油脂、跟装配有关,油脂的好坏,装配的能力都会有明显的影响。这里有很多的细节工艺,这就看各个机器人厂家的技术能力了。K系列螺旋锥齿轮减速机哪个好
- 静安区硬齿面减速机大概多少钱 2026-03-02
- 奉贤区涡轮蜗杆减速机供应商 2026-03-02
- 嘉定区现代化减速机大概多少钱 2025-12-01
- 徐汇区减速机 2025-12-01
- 长宁区减速机品牌 2025-12-01
- 普陀区K系列螺旋锥齿轮减速机现价 2025-12-01
- 闵行区硬齿面减速机现价 2025-12-01
- 静安区齿轮减速机厂家供应 2025-12-01
- 奉贤区减速机哪里好 2025-12-01
- 青浦区转角高精密减速机大概多少钱 2025-12-01
- 齿轮减速机现价 2025-12-01
- 上海齿轮减速机哪个好 2025-12-01


