- 品牌
- 智慧动锂,智锂狗
- 型号
- ZLG801L等
BMS分为纯硬件BMS保护板和软件结合硬件的BMS保护板纯硬件的BMS保护板是一组比较固定的保护参数,根据自身采集到的电压、电流、温度等状态保护与恢复,不需要MCU参与,这样的保护板也就不具备通讯信息交互的功能而软件+硬件的方式,MCU可以对信息的实时采集并且通过can、485等通讯方式与外部交互,上传BMS保护板实时信息。一般为了更好地分析电池过去的状态,尤其是在故障分析和算法建模的时候,需要大量的数据支撑,这时候就需要log存储功能,尽可能多的记录BMS的数据。 储能BMS均衡技术主要是指电池管理系统BMS中用于维护电池组中各个单体电池电量一致性的技术。机器人BMS软件开发
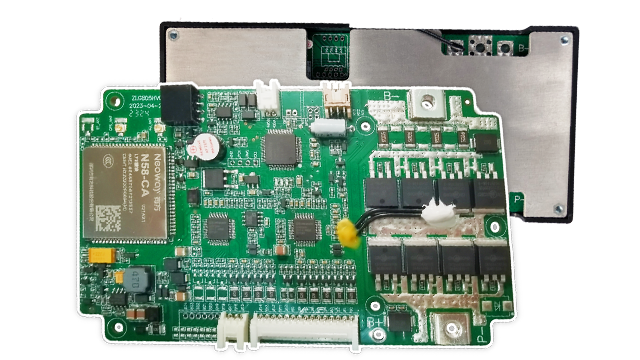
目前BMS架构主要分为集中式架构和分布式架构。集中式BMS将所有电芯统一用一个BMS硬件采集,适用于电芯少的场景。集中式BMS具有成本低、结构紧凑、可靠性高的优点,一般常见于容量低、总压低、电池系统体积小的场景中,如电动工具、机器人(搬运机器人、助力机器人)、IOT智能家居(扫地机器人、电动吸尘器)、电动叉车、电动低速车(电动自行车、电动摩托、电动观光车、电动巡逻车、电动高尔夫球车等)、轻混合动力汽车。目前行业内分布式BMS的各种术语五花八门,不同的公司,不同的叫法。动力电池BMS大多是主从两层架构。储能BMS则因为电池组规模较大,多数都是三层架构,在从控、主控之上,还有一层总控。 低速电动车BMS电池管理系统平台当电池充电时,如果电压超过设定的安全范围,BMS系统保护板会立即断开充电电路,防止电池过充。
BMS管理哪些东西?与BMS相关的几大块,电压、电流、温度、均衡,信息等,BMS保护板通过采集电压、电流、温度等信息,评估BMS当前状态。BMS首先对电池包进行信息采集,包括电压,电流,温度三个维度的信息提取。其次,BMS对电池包的SOX算法进行估算。然后BMS会对电池包进行安全诊断,包括过流,过压,欠压,高温,低温,断路的保护。再次是对电池包的能量进行管理,一般分为被动管理和主动管理两种类型。还会对电池包进行信息的管理,包含数据的整车交互以及日志的存储。
电池包保护板设计中需要考虑的因素较多,如电压平台问题,锂动力电池包在使用中往往被要求很大的平台电压,所以设计锂动力电池包保护板时尽量使保护板不影响电芯的放电电压,这样对控制IC、采样电阻等元件的要求就会很高,电流采样电阻应满足高精密度,低温度系数,无感等要求。锂电池保护板的电路,B+、B-分别是接电芯的正、负极;P+、P-分别是保护板输出的正、负极;T为温度电阻(NTC)端口。锂电池保护板的主要功能有过充保护、过放保护、过流保护、短路保护、温度保护。 对于电池管理系统(BMS)而言,除了均衡功能外,均衡策略的制定同样至关重要。
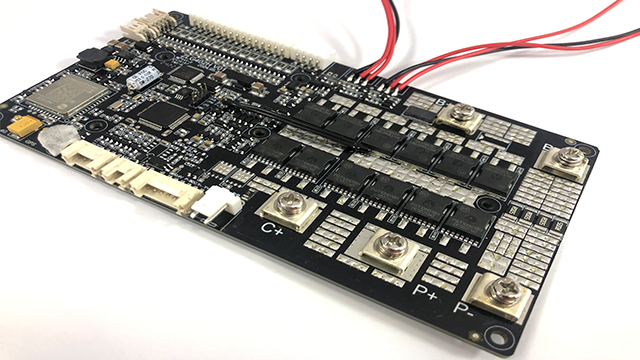
锂电池BMS保护板的过充保护:场效应管Q1、Q2可等效为两只开关,当Q1或Q2的G极电压大于1V时,开关管导通。导通开关管的D、S间内阻很小(数十毫欧姆),相当于开关闭合;当G极电压小于0.7V时,开关管截止,截止的开关管的D、S极间的内阻很大(几兆欧姆),相当于开关断开。电池包充电时,当锂动力电池包通过充电器正常充电时,随着充电时间的增加,电芯两端的电压将逐渐升高,当电芯电压升高到4.4V(通常称为过充保护电压)时,控制IC将判断电芯已处于过充电状态,控制IC将使Q2截止,此时电芯的B一极与保护电路的P-端之间处于断开状态并保持,即电芯的充电回路被切断,停止充电。如果需要更高级的电池管理策略,对灵活性和升级能力有更高要求,那么软件BMS板可能更为合适。什么是BMS电池管理系统方案开发
BMS保护板的被动均衡就是将单体电池中容量稍多的个体消耗掉,实现整体的均衡。机器人BMS软件开发
两轮电动车BMS行业内成为两轮电动车电池保护板分为硬件板与软件板。所谓硬件板,就是保护板上没有可以进行编程的芯片,只是按照特定的线路进行连接,保护板的参数是固定的。这一类保护板一般成本较低,功能简单,很难实现逻辑上的特殊控制要求。而软件板则是在硬件板的基础上,加了可以编程的芯片,因此这类保护板除了实现基本功能以外,还能实现很多特殊的功能。只要通过修改程序和添加外设,基本可以实现任何功能。比如远程引爆车辆中的锂电池。 机器人BMS软件开发
- 两轮车BMS系统 2026-05-04
- 铅酸改BMS电池管理系统工厂 2026-05-04
- 铅酸改锂电池BMS电池管理系统工厂 2026-05-04
- 电池PACKBMS电池管理系统方案定制 2026-05-04
- 发展BMS管理系统方案开发 2026-05-03
- 电摩BMS系统 2026-05-03
- 便携式电源BMS报价 2026-05-03
- 便携式户外电源BMS电池管理系统平台 2026-05-03
- 水性BMS测试 2026-05-03
- 代理BMS品牌 2026-05-03
- 国产BMS工作原理 2026-05-03
- 电动三轮车BMS价格合理 2026-05-03



