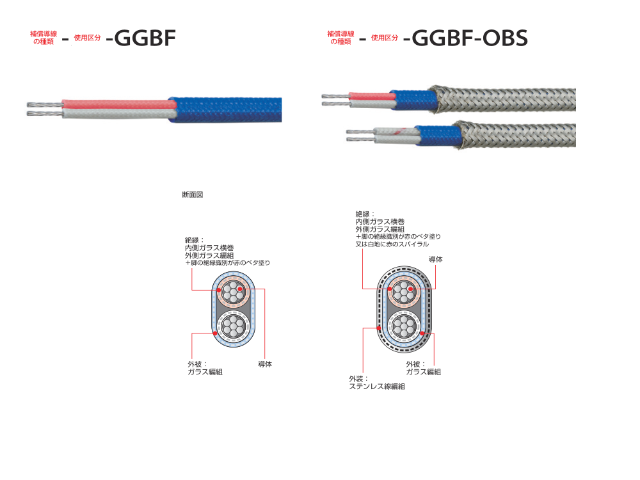
水下机器人电缆属于安防电缆:1. 水下机器人电缆的横向和纵向水密性普通的电缆一放到压强略大的水里面,会出现传输异常或者直接中断连接.这就是缺乏水下机器人电缆的纵向水密气密性.按照密封方式分为横向水密性和纵向水密性,纵向水密电缆即是利用阻水胶水或发泡阻水带,在护套破损的情况下,延缓水在电缆内部流动的速度提高设备使用的可靠性.传统水密电缆采用阻水膏密封,阻水膏在常温下固化后,将各元件结构紧密地结合在一起,形成一个实心整体,以实现阻水效果.2. 水下机器人电缆的制造工艺不同为了保证电缆的柔软度,通常电缆导体采用多股绞合的结构,这就导致一旦当绝缘层或阻水端头出现故障时,水在强大的压力作用下进入导体,沿着导体中的缝隙传输,渗入设备中,造成设备的损坏.目前的机器人电缆采用的多是包括7组绝缘线芯、填充、内衬层、铠装层、外护套;其中,7组绝缘线芯外包裹内衬层,内衬层外包裹采用镀锡铜丝编织形成的铠装层,镀锡铜丝编织角度为50°-60°,铠装层外包裹外护套,填充在绝缘线芯与内衬层之间、以及不同组绝缘线芯之间的空隙.机器人电缆承担电力、信号和数据传输任务。10米起订机器人高柔性电缆

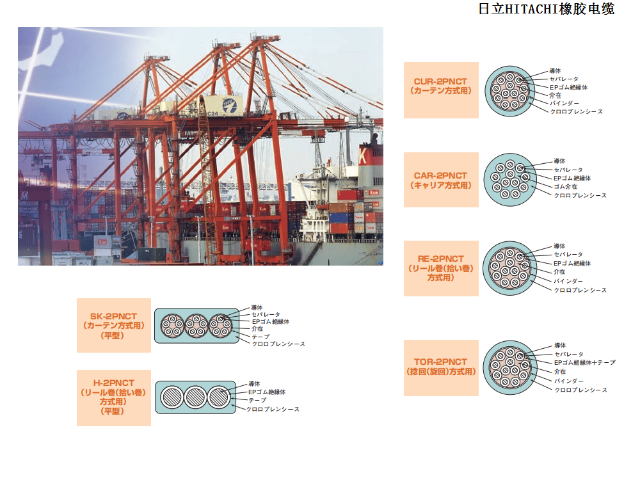
讨论机器人电缆选型:1.明确抗干扰能力:屏蔽(形式及覆盖率)决定了电缆的电磁兼容特性,也就是说对外部环境的抗干扰特性及对外部环境的电磁污染程度.铝塑复合包覆屏蔽对高频干扰具有较强的抵御能力,铜网编制屏蔽及铜丝绕包屏蔽对低频干扰具有较强的抵御能力.钢丝编制几乎无任何抗干扰能力,提供了对外部机械力损伤的保护.比较理想的是铝塑复合包覆屏蔽再加铜编制屏蔽或铜丝绕包屏蔽.覆盖率(85%)表明了包覆物或铜丝的编制,绕包在被覆盖物上的比率.2.组合电缆合计-复合电缆:如动力+控制,动力+信号,动力+控制+信号,动力+控制+信号+数据,可根据要求及使用情况设计.小批量进口机器人屏蔽电缆销售厂家机器人电缆的耐化学腐蚀性能使其能够在化学工厂等环境中使用。

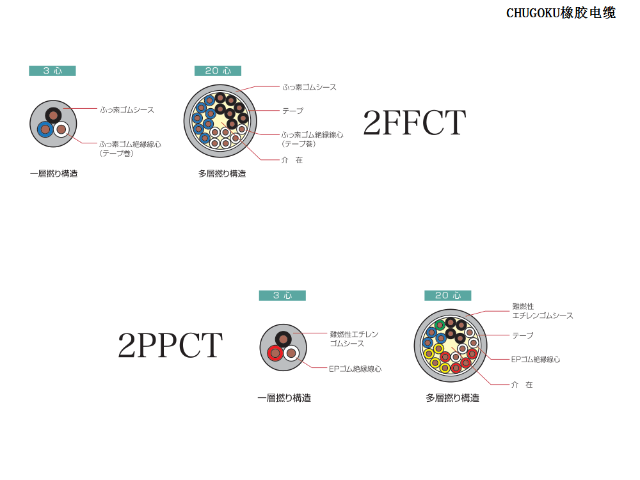
机器人用电缆的制作方法:包括由内向外依次设置的线芯层、填充层、内屏蔽层、外屏蔽层、内护套层、外护套层和防氧化层,所述线芯层由控制电缆线束、信号传输电缆线束和避雷线束组成,所述控制电缆线束、信号传输电缆线束和避雷线束的外表面形状均为正六边形,所述控制电缆线束、信号传输电缆线束和避雷线束的外表面两两之间紧密贴合.本实用新型与现有技术相比,电缆的耐弯曲程度、柔软性、耐氧化性、安全性都得到了大幅的提升,屏蔽率能够达到 85%以上,弯曲寿命在 600 万次以上,弯曲半径为单线直径的4倍,使用寿命长、维修成本低,能够满足于机器人上电缆的使用需求.
机器人电缆使用要满足以下要求: 1、使用寿命长机器人电缆使用的寿命要长,只有使用寿命长的电缆,才能节省资源,提高工作效率.使用寿命长的电缆对于企业来说是选择.如果企业需要机器人电缆,选择使用寿命长的电缆是关键,这样才能满足使用需求.2、满足柔性要求然后机器人电缆对柔性也是一定的要求,多种类型的机器人大小不一,并且使用场合都不一样,有的机器人工作时幅度比较大,操作较为频繁,假如电缆的柔性不足,不能顺着机器人的动作耐扭曲的,那么会造成电缆严重性的损坏.因此,选择机器人电缆柔性也是必要条件.机器人电缆通常采用特殊的材料制成,以抵抗长时间的机械应力。

讨论机器人电缆选型:1.明确运行速度和长度:运行速度是多少米/秒,运行长度,允许的电压降,数据传输速率等.运行速度快,弯曲寿命就短;电缆长度长,电缆的电压降就大,同样的数据传输速率就慢.2.明确使用状态,弯曲半径:考虑电缆设计和成品半径,扭曲弧度,设计时注意生产工艺不同会影响电缆的弯曲半径,超过电缆的弯曲半径时直接影响电缆的使用寿命.3.明确使用环境以及对环境的影响:环境温度,阻燃,抗酸碱,耐候性,耐高温多少度,耐低温多少度,在零下10度以上的工作环境下,易码垛机器人为例:每小时码包数量80-0包,连续24小时工作制,设计300万次的机器人电缆能够工作156天,500万次的使用寿命是260天,800万次的使用寿命是416天.机器人电缆的规格多样,可以根据不同的机器人型号和应用需求定制。伊津政专营机器人焊接电缆
机器人电缆的长度对机器人的运动控制和性能有明显影响。10米起订机器人高柔性电缆
电缆跟随:电缆跟随具有挑战性,原因有二.首先,它需要控制“抓紧力”(使滑动平稳)和“抓紧姿势”(以防止电缆从抓手的手指上掉下). 在连续操作期间,很难从常规视觉系统中捕获此信息,因为该信息通常被遮挡,解释昂贵且有时不准确. 而且,视觉传感器无法直接观察到此信息,因此该团队使用了触觉传感器.抓手的关节也很灵活可以保护它们免受潜在冲击. 该算法还可以推广到具有各种物理特性(例如材料,刚度和直径)的不同电缆,也可以推广到不同速度的电缆. 当比较应用于团队抓爪的不同控制器时,他们的控制策略可以将电缆保持在手的距离比其他三个更长.例如,“开环”控制器遵循总长度的36%,抓手在弯曲时很容易丢失电缆,并且需要多次重新抓紧才能完成任务.10米起订机器人高柔性电缆