- 品牌
- 仁源
- 型号
- 齐全
- 加工定制
- 是
- 功能
- 位置伺服,计量伺服,模拟伺服
- 驱动元件类型
- 机电
- 控制方式
- 闭环
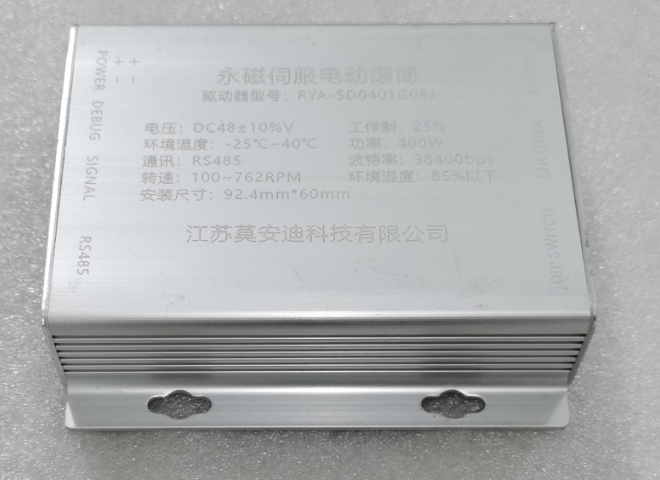
- 功率
- 5.5
- 额定电压
- 380
- 速度响应频率
- 1
- 适用电机
- 永磁伺服电机
- 产品认证
- ISO9001
- 产地
- 江苏无锡
- 厂家
- 仁源电气
设计或选型永磁无刷驱动器时需综合考虑多个参数。电机部分需确定额定电压、功率、转速范围及转矩特性,同时关注永磁体材料(如钕铁硼)的耐温性和退磁风险。控制器需匹配PWM频率、电流采样精度及保护功能(如过流、过热保护)。对于高动态应用,需选择高分辨率编码器(如17位值型);成本敏感场景则可选用霍尔传感器。散热设计也至关重要,自然冷却、风冷或液冷方案需根据功率密度选择。此外,电磁兼容(EMC)和防护等级(IP评级)需符合行业标准,如ISO13849(功能安全)或IEC61800(调速电气传动系统)。永磁无刷驱动器的使用安全性高,符合国际标准。陕西低压永磁无刷驱动器推荐厂家

永磁无刷驱动器的控制技术是其性能的关键因素之一。常见的控制方法包括电流控制、速度控制和位置控制等。电流控制主要通过调节电流波形来实现对电动机的扭矩控制,确保电动机在不同负载下的稳定运行。速度控制则通过反馈系统监测电动机的转速,并根据设定值进行调整,以实现精确的速度控制。位置控制则是通过闭环反馈系统实现对电动机转子位置的精确控制,广泛应用于伺服系统中。此外,现代永磁无刷驱动器还结合了先进的数字信号处理技术和智能算法,提高了控制精度和响应速度。山东无霍尔矢量永磁无刷驱动器定制开发永磁无刷驱动器的成本逐渐降低,市场竞争力增强。
与传统有刷电机相比,永磁无刷驱动器具有明显优势。首先,由于没有电刷和换向器的机械摩擦,其能量损耗更低,效率更高,通常可达90%以上。其次,无刷设计减少了机械磨损,延长了使用寿命,同时降低了维护成本。此外,永磁无刷驱动器具有更高的功率密度和更快的动态响应能力,能够实现精确的速度和位置控制。其低噪音和低电磁干扰特性也使其在应用场景中备受青睐,如医疗设备、航空航天和精密仪器等领域。永磁无刷驱动器的控制策略直接影响其性能。常见的控制方法包括方波控制(六步换相)和正弦波控制(FOC,磁场定向控制)。方波控制简单易实现,适用于低成本应用,但会产生较大的转矩脉动和噪音。而FOC通过将三相电流分解为直轴和交轴分量,能够实现平滑的转矩输出和更高的控制精度,适用于高性能场景。此外,现代驱动器还引入了先进算法,如模型预测控制(MPC)和自适应控制,以进一步提升系统的动态性能和鲁棒性。
随着科技的不断进步,永磁无刷驱动器的未来发展趋势主要体现在几个方面。首先,随着材料科学的发展,永磁材料的性能将不断提升,驱动器的功率密度和效率有望进一步提高。其次,智能化控制技术的进步将使得永磁无刷驱动器具备更强的自适应能力,能够在复杂环境中稳定运行。此外,随着可再生能源的普及,永磁无刷驱动器在风能和太阳能发电系统中的应用将日益增加。蕞后,随着电动汽车市场的快速增长,永磁无刷驱动器的需求将持续上升,推动相关技术的创新与发展。其电机设计优化,提升了整体系统的效率。
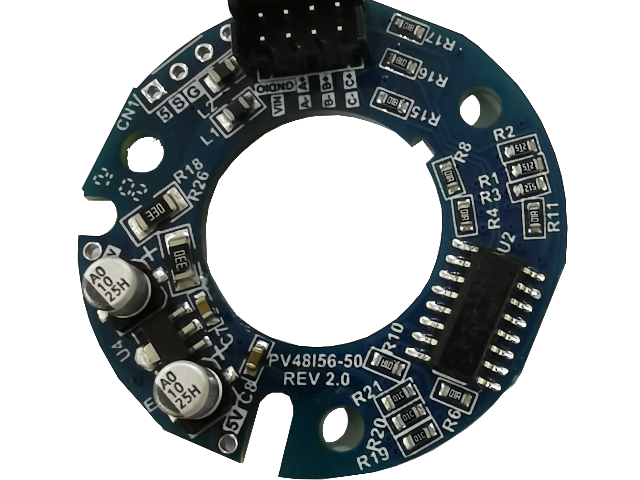
永磁无刷驱动器的工作原理主要依赖于电磁感应和电子控制技术。驱动器通过传感器(如霍尔传感器)检测转子的位置信息,并将其反馈给控制器。控制器根据转子的位置,实时调整施加在定子绕组上的电流,以产生旋转磁场。这个旋转磁场与转子上的永磁体相互作用,产生转矩,使转子旋转。由于没有碳刷的摩擦损耗,永磁无刷驱动器的效率通常高于90%。此外,电子控制系统还可以实现多种运行模式,如恒速、变速和位置控制,使得其在不同应用场景中具有极大的灵活性。这种驱动器能够实现快速响应和高动态性能。陕西物流输送永磁无刷驱动器厂家
永磁无刷驱动器在机器人技术中发挥着重要作用,提升了精度。陕西低压永磁无刷驱动器推荐厂家
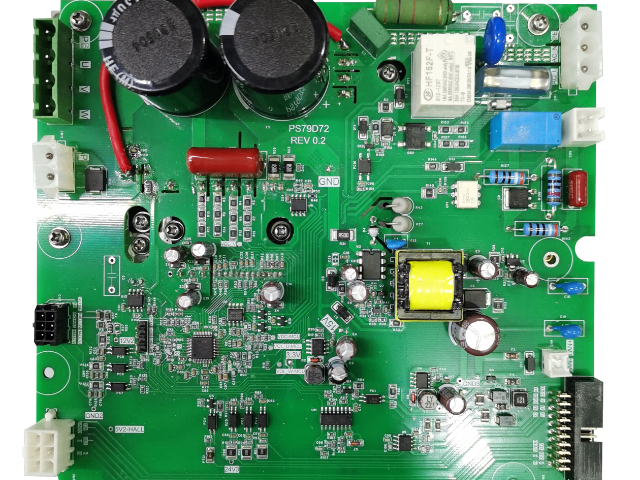
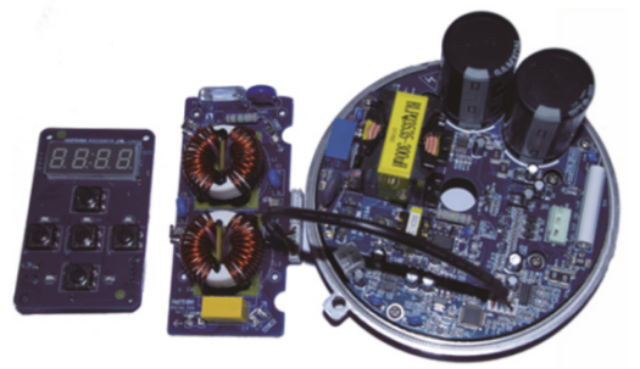
永磁无刷驱动器主要由电机本体、控制器和传感器三部分组成。电机本体包括定子绕组和永磁体转子,定子绕组通常采用三相结构,而转子则由高性能永磁材料(如钕铁硼)制成。控制器是驱动器的“大脑”,负责根据传感器反馈的转子位置信息,生成PWM信号以控制功率开关器件(如MOSFET或IGBT),从而调节电机转速和扭矩。传感器则用于实时检测转子位置,常见的传感器包括霍尔传感器、旋转变压器和光电编码器。这些组件的协同工作确保了驱动器的高精度和高可靠性。陕西低压永磁无刷驱动器推荐厂家
随着科技的不断进步,永磁无刷驱动器的未来发展趋势主要体现在几个方面。首先,随着材料科学的发展,永磁体的性能将进一步提升,驱动器的功率密度和效率将不断提高。其次,智能化控制技术的应用将使永磁无刷驱动器具备更强的自适应能力和智能化水平,能够更好地满足复杂应用场景的需求。此外,随着可再生能源的普及,永磁无刷驱动器在风能、太阳能等领域的应用将日益增加。蕞后,随着电动汽车和智能制造的快速发展,永磁无刷驱动器的市场需求将持续增长,推动相关技术的创新与进步。总之,永磁无刷驱动器将在未来的电动机驱动技术中继续发挥重要作用。永磁无刷驱动器的启动性能优越,能够快速达到设定转速。浙江永磁同步永磁无刷驱动器生产研发为...
- 陕西FOC永磁无刷驱动器厂家 2026-03-10
- 山东永磁无刷永磁无刷驱动器定制开发 2026-03-10
- 安徽永磁无刷驱动器生产研发 2026-03-09
- 物流输送永磁无刷驱动器哪家好 2026-03-09
- 山东永磁矢量永磁无刷驱动器哪家好 2026-03-09
- 陕西同步电机永磁无刷驱动器 2026-03-09
- 江苏高压永磁无刷驱动器生产厂家 2026-03-09
- 辽宁外置永磁无刷驱动器批发厂家 2026-03-09
- 辽宁永磁无刷永磁无刷驱动器定制 2026-03-09
- 河北永磁无刷永磁无刷驱动器生产厂家 2026-03-09


- 山东永磁矢量永磁无刷驱动器批发 2026-03-08
- 安徽永磁无刷驱动器销售厂家 2026-03-08
- 北京EC内置永磁无刷驱动器定制 2026-03-08
- 山东无霍尔永磁无刷驱动器定制 2026-03-08
- 上海矢量电机控制永磁无刷驱动器定制 2026-03-08
- 广东滚筒电机永磁无刷驱动器定制开发 2026-03-07


- 浙江永磁同步直流无刷驱动器推荐厂家 03-10
- 山东永磁无刷永磁无刷驱动器定制开发 03-10
- 安徽无霍尔矢量直流无刷驱动器批发 03-10
- 辽宁EC风机控制直流无刷驱动器推荐厂家 03-10
- 北京永磁矢量直流无刷驱动器 03-09
- 辽宁农业永磁水泵变频一体电机批发 03-09
- 安徽永磁无刷驱动器生产研发 03-09
- 物流输送永磁无刷驱动器哪家好 03-09
- 山东永磁矢量永磁无刷驱动器哪家好 03-09
- 陕西同步电机永磁无刷驱动器 03-09