直线模组作为现代工业自动化和智能制造领域的关键基础部件,近年来在市场上的表现尤为引人注目。随着技术的不断进步和应用领域的不断拓展,直线模组的市场前景愈发广阔,滑台模组作为其中的重要一环,其市场规模也在持续扩大。本文将从直线模组的技术特点、市场应用、未来趋势以及滑台模组的市场表现等多个方面进行深入探讨,以期为相关从业者提供有价值的参考。
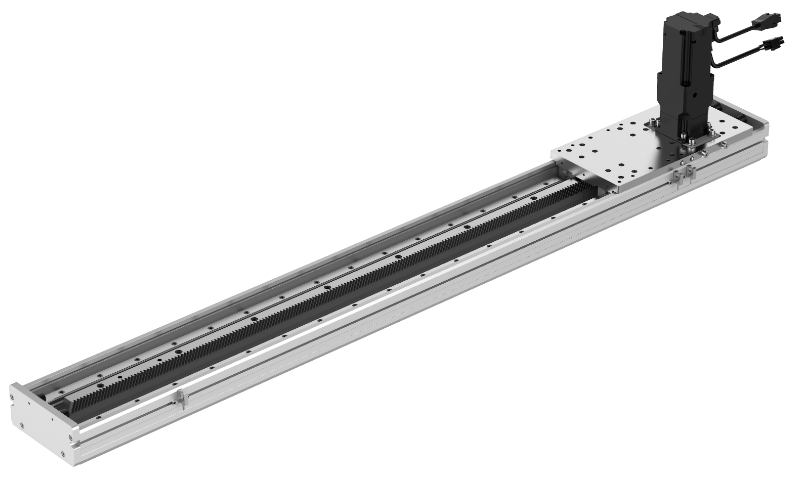
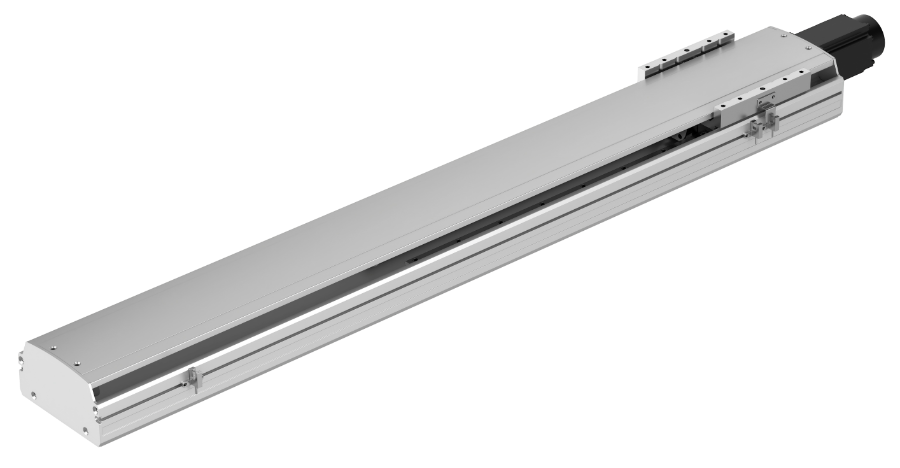
从技术特点来看,直线模组具有明显的优势。一方面,它采用了滚动摩擦代替滑动摩擦,摩擦力小,动静态摩擦力相差小,低速时不易产生爬行现象,从而保证了运动的平稳性和准确性。另一方面,直线模组通过电磁驱动直接实现直线运动,取消了中间传动环节,损耗和误差小,具备出色的动态响应、高效率、高精度和高速度特点。这些技术优势使得直线模组在制造领域具有广泛的应用前景。 直线模组有几种叫法,线性模组、直角坐标机器人、直线滑台等。南京高精度直线模组公司
误区四:刚性匹配忽视动态响应
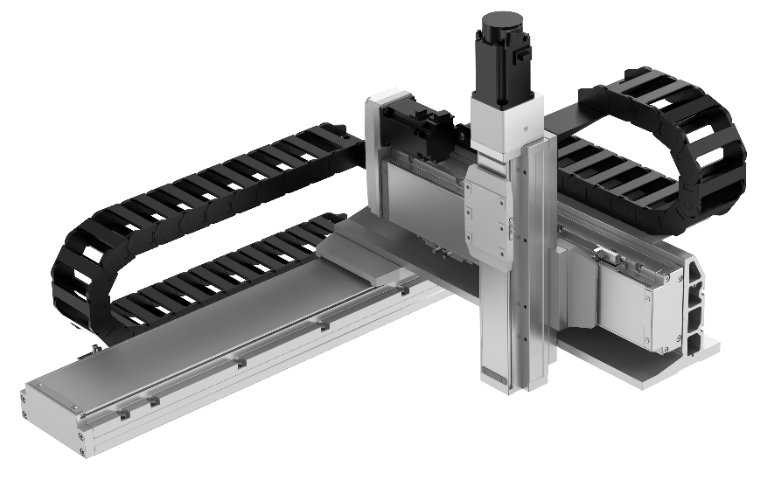
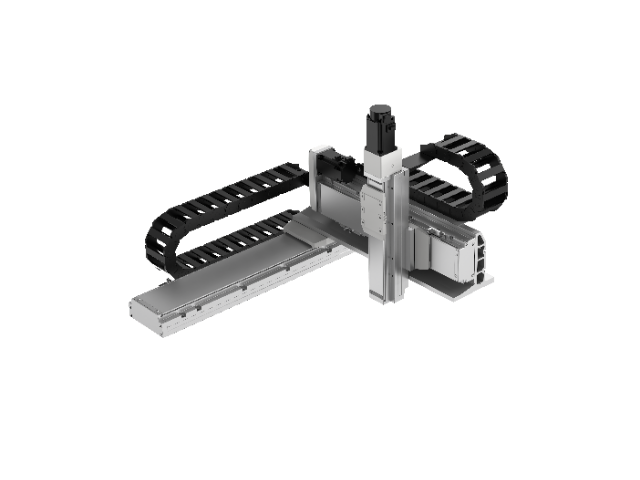
某锂电池叠片机因模组刚性不足产生0.12mm振幅,导致极片对齐失败。选型时需计算系统固有频率:当驱动频率接近模组固有频率的80%时,必须更换更高刚性的型号。建议采用k=3EI/L³公式校核,确保系统刚度值≥50N/μm。多轴联动场景更需整体考量。机器人第七轴案例表明,当X轴模组刚性比Y轴高30%时,会产生17%的轨迹偏差。应通过有限元分析验证多轴刚度匹配,必要时采用加强筋结构或改变支撑跨距。
误区五:忽视全生命周期成本
某光伏串焊机选型时比较采购成本,未计算维护费用。进口模组5年总成本达28万,而国产模组虽然贵5万采购价,但润滑周期延长3倍,总成本反低9万。建议建立TCO模型,将能耗、保养、备件损耗纳入计算。模块化设计可降低隐性成本。某汽车厂通过选用可快速更换的导轨模组,使产线改造时间从72小时缩短至8小时。选型时应优先考虑具备快拆结构、标准化接口的产品。 淮安龙门直线模组厂家安装间隙:直线模组的安装间隙应控制在允许范围内,通常在0.1mm以内。
直线模组滑台的四个重要参数
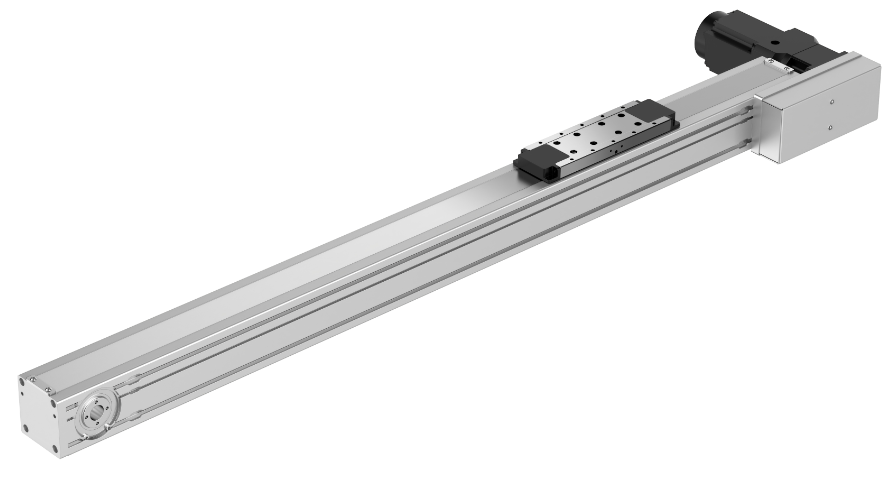
行程:滑台模组的滑块在工作时运动的有效路径长度,行程越长,负载会带来的影响就越大。直线模组滑台的长处很多,它的结构紧凑,体积很小,不需要其他的辅助设备,所以对安装的空间要求不大;它直接由电机驱动,没有中间转化环节,节省了能耗;干净无污染,有电就可以工作,不会有漏油漏气的问题,故障概率很低;整个模组采用的是精度的直线导轨,精度高,效率高,负载大,运行平稳;在模组两端会设有限位开关,能精确定位,可以根据用户的实际应用需求进行定制;采用铝合金材料,重量轻,长期使用基本不需要维修;驱动器可以选用伺服电机或者步进电机,配置灵活。
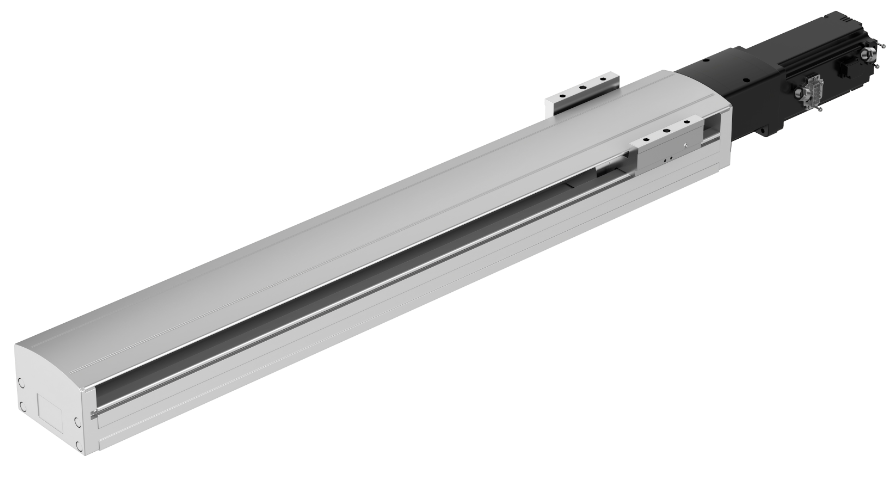
滑台模组作为直线模组的一种重要形式,其市场规模也在持续扩大。滑台模组是一种通过导轨和滑块实现直线运动的装置,具有结构简单、安装方便、维护容易等优点。在自动化生产中,滑台模组被广泛应用于物料搬运、定位装配等工序中,提高了生产效率和产品质量。随着制造业的转型升级和智能化水平的提升,滑台模组的市场需求也在不断增加。特别是在汽车制造、电子制造等行业中,滑台模组的应用已经成为自动化生产线的重要组成部分。
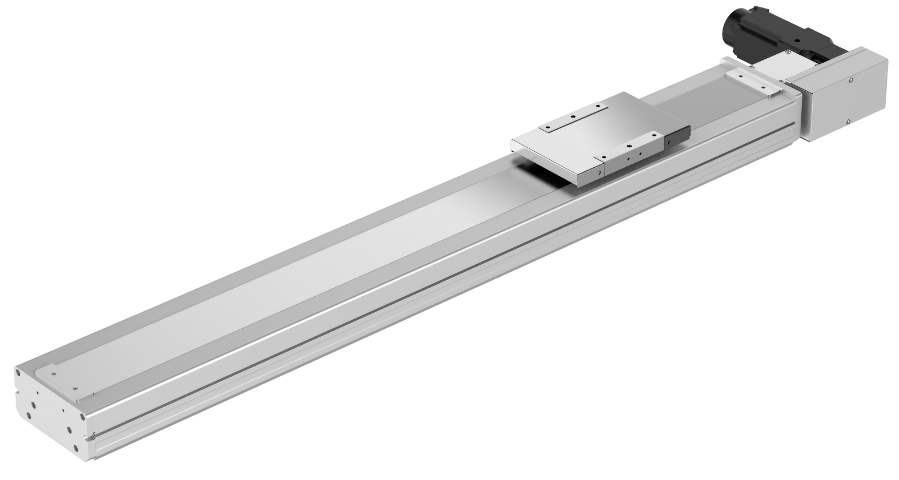
综上所述,直线模组及滑台模组作为现代工业自动化和智能制造领域的关键基础部件,具有广阔的市场前景和巨大的发展潜力。随着技术的不断进步和应用领域的不断拓展,直线模组及滑台模组的市场规模将持续扩大。然而,在快速发展的同时,企业也需要密切关注市场动态和技术发展趋势,制定合理的投资策略和风险控制措施以应对潜在 滚珠丝杆式直线模组:高精度的 “短途能手” 。
直线滑台模组选型需要注意的地方
4.导向精度以及模组和支撑件的热变形等,导向精度是指运动构件沿导轨运动时其运动轨迹的准确水平。影响导向精度的主要因素有导轨承导面的几何精度、导轨和支撑件的接触精度、外表粗糙度、导轨和支撑件的刚度、导轨副的油膜厚度及油膜刚度。5.运动平稳性模组是指导轨在低速运动或微量移动时不出现爬行现象的性能。单轴手臂平稳性与导轨的结构、导轨副材料的匹配、润滑状况、润滑剂性质及导轨运动之传动系统的刚度等因素有关。选取直线滑台模组的时候首先确定的是手动调理还是电机节制,然后顺次确定位移行程,负载大小,位移精度,分辨率,外形尺寸。直交机械手由于可以进行电路细分,分辨率可以到达超微米级,还可以经过核算机节制,到达自动化目标。 在自动化设备与精密机械领域,直线模组是实现直线运动的部件。芜湖KK模组厂家
当直线模组出现故障时(如不到位、产品未取出、产品掉落等);南京高精度直线模组公司
直线模组定位不准调整技巧
首先排查机械结构连接问题。检查模组的滚珠丝杠与电机联轴器是否松动,若存在间隙,需松开联轴器固定螺丝,重新对齐丝杠轴与电机轴(同轴度误差≤0.02mm),再按规定力矩(通常15-20N・m)紧固;查看滑块与工作台的连接螺丝是否拧紧,用扭矩扳手逐颗检查,确保无松动,避免因连接虚位导致定位偏差。
其次校准脉冲参数与补偿设置。进入数控系统参数界面,核对电子齿轮比是否与模组导程、电机步距角匹配(计算公式:电子齿轮比=(导程×1000)/(电机步距角×减速比)),若参数错误需重新设定;针对定位累积误差,可通过系统的“定位补偿”功能,在特定位置设置补偿值(如在500mm处偏差0.02mm,补偿+0.02mm),多次测试后将误差控制在0.01mm以内。 南京高精度直线模组公司
苏州尚恩格科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的电工电气中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同苏州尚恩格科技公司供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!