- 产地
- 上海
- 品牌
- 恩凤
- 型号
- 齐全
- 是否定制
- 是
西门子S7-1200可配置通讯接口RS485,该接口可连接绝dui值编码器的RS485信号,包括单圈绝dui值和多圈绝dui值,绝dui值编码器的RS485信号有多种形式,较为常用的有简单型RS485广播模式(主站模式主动广播发送)、带地址由指令发送的自由协议(从站被动模式)、Modbus RTU模式等等,其中如果连接一个绝dui值编码器,可用编码器主动模式,协议简单信号可靠,而如果要连接多个编码器(总线方式),可选用Modbus Rtu模式,但是该方式因为要轮询,每个编码器返回数据刷新较慢,不适合快速移动的控制。编码器为角度编码器或直线光栅尺,它们是全闭环编码器。南京OCD-DPB1B-1213-B150-OCC绝DUI值编码器诚信经营

线性编码器同样使用磁栅编码阵列和霍尔编码阵列协调工作,线性编码器的霍尔编码阵列叫作"阅读器",磁栅编码阵列叫作"感应标尺".但是线性编码器采用的霍尔元件是线性霍尔,当霍尔元件保持一定间隙沿磁栅轴线表面移动时,线性霍尔感测出类似正弦波信号的位移量信息。信号分割器重分正弦波微电流信号,可以得到精度非常高的位置信息。理论上讲,只要信号分割器分割的足够细,系统的分辨率可以非常高。在实际工况下,由于杂散磁场、电磁干扰等因素影响,系统分辨率只能达到0.17毫米的水平。由于霍尔编码阵列元件工作在线性状态,系统受外界温度、湿度、杂散磁场、电磁干扰等因素的影响比较大。唐山POSITALOCD58-12025-S30编码器质保18月编码器可以在电梯控制上提供可靠精细的位置信号和速度信号,完成电梯的正常运转。

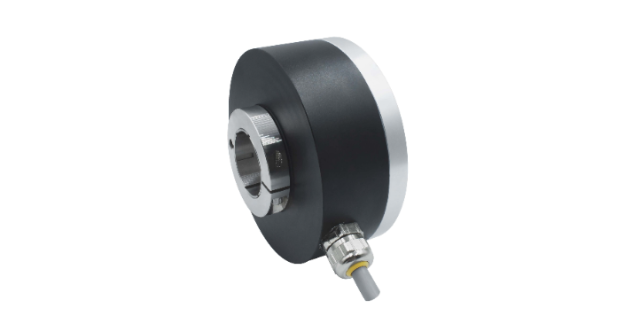
绝对值编码器的机械安装有高速端安装、低速端安装、辅助机械装置安装等多种形式。1)高速端安装:安装于动力马达转轴端(或齿轮连接),此方法优点是分辨率高,由于多圈编码器有4096圈,马达转动圈数在此量程范围内,可充分用足量程而提高分辨率,缺点是运动物体通过减速齿轮后,来回程有齿轮间隙误差,一般用于单向高精度控制定位,例如轧钢的辊缝控制。另外编码器直接安装于高速端,马达抖动须较小,不然易损坏编码器。2)低速端安装:安装于减速齿轮后,如卷扬钢丝绳卷筒的轴端或后面一节减速齿轮轴端,此方法已无齿轮来回程间隙,测量较直接,精度较高,此方法一般测量长距离定位,例如各种提升设备,送料小车定位等。3)辅助机械安装:常用的有齿轮齿条、链条皮带、摩擦转轮、收绳机械等。
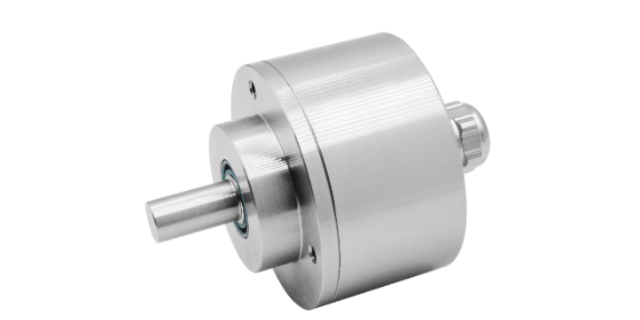
光电编码器的主要工作原理为光电转换,是一种通过光电转换将输出轴的机械几何位移量转换为脉冲或数字量的传感器。光电编码器主要由光栅盘和光电检测装置构成,在伺服系统中,光栅盘与电动机同轴致使电动机的旋转带动光栅盘的旋转,再经光电检测装置输出若干个脉冲信号,根据该信号的每秒脉冲数便可计算当前电动机的转速。光电编码器的码盘输出两个相位差相差90度的光码,根据双通道输出光码的状态的改变便可判断出电动机的旋转方向。编码器的电源可以是外接电源,也可直接使用PLC的DC24V电源。

所以根据A/B/Z三个脉冲状态完全可以分析出编码器的运动状态,即速度,角度,方向,和旋转多圈的位置。信号线同时用可以实现计数,位置控制和测量速度等,而z信号就是零点位置,即编码器转一圈输出一个Z。
伺服编码器在输出信号特征上与普通编码器的不同。临汾POSITALOCD58-SS12151编码器特价
编码器的主要用途是测速和定位。南京OCD-DPB1B-1213-B150-OCC绝DUI值编码器诚信经营
旋转增量式编码器以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确性的。为此,在工控中就有每次操作先找参考点,开机找零等方法。这样的编码器是由码盘的机械位置决定的,它不受停电、干扰的影响。南京OCD-DPB1B-1213-B150-OCC绝DUI值编码器诚信经营
- 唐山BH58M3600/35J4058R编码器诚信经营 2026-05-05
- 连云港POSITALOCD58-CB0021-P107编码器怎么样 2026-05-05
- 苏州FIN090T-S22H-CR1A2编码器定制价格 2026-05-05
- 南京EF80TS-1212-DP250 编码器诚信经营 2026-05-05
- 南京FIM090T-M25NH-DRWS1编码器定制价格 2026-05-05
- 临汾BH80M3600/45J/4058BR编码器诚信经营 2026-05-05
- 石家庄BH58M3600/35J4058R编码器代理 2026-05-05
- 石家庄BH80M1000/12J3058BR编码器定制价格 2026-05-04
- 安徽BH80M3600/35J4058BR编码器定制价格 2026-05-04
- 临汾EF80TS-1212-DP250 编码器钢厂订制 2026-05-04
- 临汾BH80M3600/60J/405BR编码器钢厂订制 2026-05-04
- 唐山BH80M3600/60J/405BR编码器定制价格 2026-05-04