电磁特性仿真验证与实车测试的误差主要源于模型简化与环境因素模拟的局限性,但通过技术优化可控制在合理范围。仿真需构建电机、电控系统的电磁模型,考虑磁饱和、涡流损耗等非线性特性,模拟不同工况下的磁场分布与电磁力变化。误差来源包括:忽略细微结构对磁场的影响、材料参数与实际存在偏差、环境温度对电磁特性的动态...
汽车仿真基本参数
- 品牌
- Ganztech
- 型号
- 汽车仿真
- 软件类型
- 建模仿真软件
- 版本类型
- 网络版
- 语言版本
- 简体中文版
汽车仿真企业商机
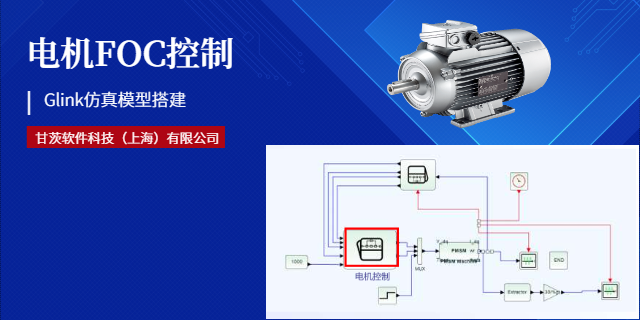
汽车电驱动系统建模仿真涵盖电机本体、控制器与传动机构的协同分析,是优化电驱动效率的重要手段。电机建模需精确描述永磁同步电机的电磁特性,包含磁链、电感的非线性变化,通过有限元分析计算不同工况下的铜损、铁损;控制器模型则需搭建FOC控制算法框架,模拟电流环、速度环的PI调节器动态响应,优化弱磁控制策略。传动系统建模需考虑齿轮啮合间隙、减速器效率,分析动力传递过程中的能量损耗。通过联合仿真可获得电驱动系统的效率Map图,为整车能量管理策略开发提供关键数据,助力新能源汽车续航能力提升。电池系统模拟仿真控制工具,需准确复现充放电逻辑,为能量管理与安全控制提供支持。陕西底盘控制仿真验证技术原理

整车半主动悬架仿真及优化测试软件需具备多体动力学建模与控制算法联合仿真能力。软件应能搭建包含弹簧、阻尼器、导向机构的悬架多体模型,准确定义弹性元件刚度、阻尼系数等参数,模拟悬架在不同路面激励下的动态响应。同时支持与控制算法模型(如PID控制、模型预测控制)联合仿真,分析阻尼调节策略对车身姿态的影响,如侧倾抑制、振动衰减效果。优化模块需能通过参数迭代,寻找不同工况下的阻尼系数,提升乘坐舒适性与操纵稳定性。这类软件需适配整车多体动力学模型,实现悬架系统与整车性能的协同分析,为半主动悬架的参数匹配与控制策略优化提供可靠工具。陕西底盘控制仿真验证技术原理动力系统仿真验证软件的准确性,可从动力传递模拟与实车数据的吻合度判断。
汽车软件测试仿真验证贯穿软件开发的整个过程,通过模型在环(MIL)、软件在环(SIL)、硬件在环(HIL)这三个不同层级的测试,一步步验证控制算法和软件逻辑的有效性。MIL测试阶段主要关注算法逻辑对不对,通过搭建控制模型和虚拟运行环境,测试软件在理想条件下能不能实现预期功能。到了SIL测试阶段,会把生成的目标代码放到仿真环境里运行,检查代码的执行效率和逻辑是否和模型一致,找出内存泄漏等潜在问题。针对自动驾驶软件,仿真验证还要覆盖多传感器融合、路径规划等关键模块,通过大量的虚拟场景测试软件的抗干扰能力和稳定性。这种分层次的验证方式能在软件开发的早期就发现问题,不用等到后期实车测试才暴露,降低了实车测试的成本和风险,确保汽车软件既能满足功能安全标准,又能达到实际使用中的性能要求。
汽车整车仿真软件服务商需具备提供多维度仿真工具与全流程技术支持的能力,覆盖整车操纵稳定性、动力性、经济性等性能指标。其服务包括推荐适配不同车型的仿真软件,协助车企搭建包含车身、底盘、动力系统的高精度整车模型,模型需能反映各部件间的动态耦合关系,如底盘悬架变形对动力传递效率的影响。同时,配备专业技术团队提供模型校准服务,通过实车测试数据对模型进行多轮优化,确保仿真结果的可靠性。此外,还能指导工程师开展标准工况(如NEDC循环、蛇形试验)与自定义场景的仿真分析,输出包含数据图表与优化建议的规范报告,帮助车企在设计阶段各方位评估整车性能,缩短开发周期。底盘控制汽车仿真聚焦转向、制动等系统联动,可准确捕捉操控特性,辅助控制策略优化。

电磁特性仿真验证与实车测试的误差主要源于模型简化与环境因素模拟的局限性,但通过技术优化可控制在合理范围。仿真需构建电机、电控系统的电磁模型,考虑磁饱和、涡流损耗等非线性特性,模拟不同工况下的磁场分布与电磁力变化。误差来源包括:忽略细微结构对磁场的影响、材料参数与实际存在偏差、环境温度对电磁特性的动态影响等。通过引入高精度有限元算法、采用实车测试数据校准模型参数,可将关键指标(如电机输出扭矩、效率)的误差控制在可接受范围,满足工程开发需求。甘茨软件科技(上海)有限公司在永磁同步电机控制仿真方面有成功案例,其在电磁特性仿真验证领域的经验可有效缩小与实车测试的误差。汽车仿真与实车测试的误差多源于模型构建或环境参数设置的偏差,优化后可缩小差距。江西整车协同汽车模拟仿真哪个工具准确
汽车电驱动系统建模仿真要兼顾电磁特性与动力输出,才能准确反映电机与控制器的协同效果。陕西底盘控制仿真验证技术原理
汽车联合仿真建模软件通过标准化接口实现多域模型的无缝集成,支持整车性能的跨学科协同优化。软件需兼容多体动力学、流体力学、控制算法等不同类型模型,定义统一的数据交互格式,实现不同工具的联合仿真。在底盘开发中,可将悬架多体模型与PID控制模型联合,分析控制参数对操纵稳定性的影响;动力系统开发中,能整合发动机热力学模型与变速箱动力学模型,优化换挡时机与动力输出。软件应具备高效的协同仿真引擎,支持分布式计算以提升大规模模型的求解速度,为整车多目标优化(如动力性与经济性平衡)提供强大技术支撑。陕西底盘控制仿真验证技术原理
与汽车仿真相关的文章
广西自动驾驶仿真验证品牌
- 北京整车制动性能仿真验证测试选什么软件 2026-04-21
- 云南动力系统汽车模拟仿真解决方案提供商 2026-04-20
- 海南整车动力性能汽车模拟仿真什么品牌服务好 2026-04-19
- 青海电机控制汽车模拟仿真哪个工具准确 2026-04-18
- 天津电池系统汽车仿真什么品牌服务好 2026-04-18
- 深圳电机控制仿真验证与实车测试误差大吗 2026-04-18
- 天津电池系统汽车模拟仿真测试选什么软件 2026-04-17
- 黑龙江底盘控制汽车模拟仿真软件服务商 2026-04-16
- 福建汽车模拟仿真实施方案 2026-04-16
- 福建新能源汽车汽车模拟仿真与实车测试误差大吗 2026-04-15
- 杭州新能源汽车汽车模拟仿真定制开发 2026-04-15
- 广东电池系统仿真验证用什么软件好 2026-04-15
与汽车仿真相关的新闻
-
广西整车动力性能汽车仿真实施方案 2026-04-11 01:03:22新能源汽车仿真测试软件覆盖三电系统与整车性能的全维度测试,是新能源汽车开发的关键工具。软件需提供电池测试模块,可模拟不同充放电倍率、温度下的电池特性,验证BMS的SOC估算精度与均衡控制效果;电机测试模块能仿真不同转速、扭矩下的电机效率与温升,优化电机控制策略。整车测试模块需支持NEDC、WLTP等...
-
沈阳电机控制汽车仿真用什么软件好 2026-04-11 00:14:59底盘控制汽车仿真聚焦于制动、转向、悬架系统的控制逻辑与性能表现,通过高精度建模实现对底盘动态特性的虚拟评估。仿真需搭建包含ABS液压管路、EPS助力电机、悬架多体结构的详细模型,定义摩擦系数、刚度系数等关键参数,模拟不同路况下的底盘响应。针对制动系统,分析制动力分配与ABS控制策略对制动距离和车身稳...
-
山西电磁特性仿真验证定制开发 2026-04-11 10:03:18自动驾驶汽车仿真工具的准确性取决于场景覆盖度、传感器模型精度、动力学仿真能力与算法迭代适配性。在场景覆盖方面,能生成海量多样化场景(如极端天气、特殊路况、复杂交通参与者交互)的工具更具优势,可测试算法的鲁棒性;传感器模型需准确模拟激光雷达点云噪声、摄像头畸变、毫米波雷达信号衰减等特性,确保感知算法测...
-
山西底盘控制仿真验证项目报价 2026-04-11 13:03:08自动驾驶汽车仿真测试软件需要搭建一个覆盖感知、决策、控制全流程的虚拟测试空间,为自动驾驶系统开发提供可靠的测试环境。这款软件要能创建丰富多样的场景库,里面包含各种道路类型、天气状况以及不同行为的交通参与者。同时要支持激光雷达、摄像头等常用传感器的仿真,模拟它们在实际环境中的工作状态,比如传感器信号里...
与汽车仿真相关的问题
新闻资讯
产品推荐
-

重庆PID控制算法什么品牌服务好
2026-04-20 -
山西科学计算哪家公司专业
2026-04-19 -

天津车载通信基于模型设计用什么工具
2026-04-19 -

杭州仿真验证基于模型设计有哪些靠谱平台
2026-04-19 -

青海汽车发动机科学分析软件推荐
2026-04-19 -
海南整车动力性能汽车模拟仿真什么品牌服务好
2026-04-19 -

天津装备制造智能控制算法
2026-04-19 -
广东低成本科学分析服务商推荐
2026-04-18 -

青海电机控制汽车模拟仿真哪个工具准确
2026-04-18