汽车电子测试转接头在自动驾驶系统测试中面临特殊挑战。为验证多传感器融合算法,转接头需同时传输摄像头的 LVDS 信号、毫米波雷达的射频信号、激光雷达的点云数据等多种类型信号,这要求转接头具备混合信号传输能力。在高动态测试场景中,如车辆加速、制动过程中的传感器响应测试,转接头需保持信号传输的连续性,避免因振动导致的瞬时断开。针对冗余设计的自动驾驶电子系统,转接头需支持双通道并行测试,确保主备系统的测试数据同步采集,为自动驾驶系统的功能安全与预期功能安全(SOTIF)验证提供可靠连接。汽车电子测试转接头的耐油性设计,适应发动机舱内汽车电子部件的测试环境。东莞安全汽车电子连接方案
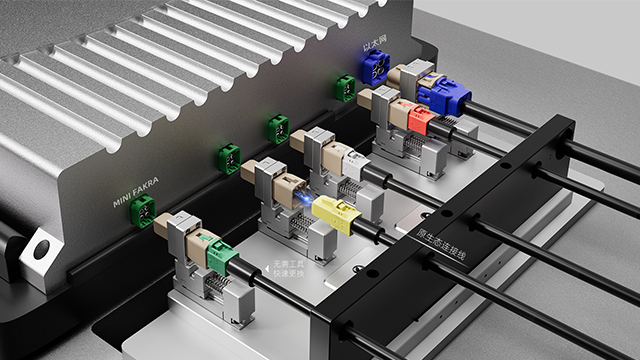
汽车电子测试转接头的信号完整性分析是确保测试准确性的关键环节。通过时域反射仪(TDR)测量转接头的阻抗变化,确保在信号传输路径上的阻抗波动不超过 ±10%。眼图测试验证高速信号(如车载以太网 1000BASE-T1)经过转接头后的信号质量,确保在 100m 传输距离内仍能保持清晰的眼图张开度。对于差分信号(如 CAN FD),转接头的共模抑制比(CMRR)需大于 40dB,防止共模噪声转化为差模干扰。信号完整性测试不仅关注转接头本身的性能,还需考虑其与测试线缆、连接器的匹配性,形成完整的信号传输链路优化方案。珠海自动化汽车电子连接器磁性汽车电子测试转接头,实现快速定位连接,提升汽车电子测试效率。
智能驾驶汽车电子测试模组需具备多传感器仿真能力,其视觉仿真模块可输出 LVDS 格式的虚拟摄像头信号,帧率达 60fps,分辨率支持 1920×1080;雷达仿真模块能生成点云数据,模拟不同距离、速度的目标物;激光雷达仿真则可提供百万点级的 3D 点云,模拟雨、雾等天气对传感器的影响。传感器数据同步精度控制在 1ms 以内,确保多传感器融合算法的测试有效性。通过与场景引擎(如 Prescan)对接,模组可复现海量真实交通场景,从各方面验证自动驾驶系统的感知与决策能力。
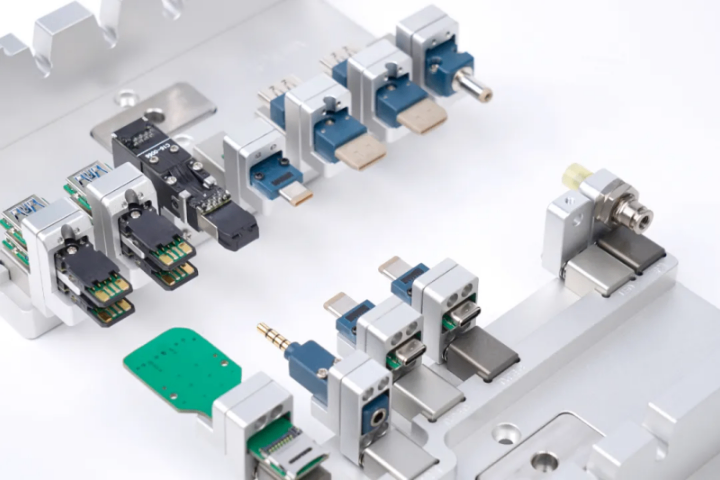
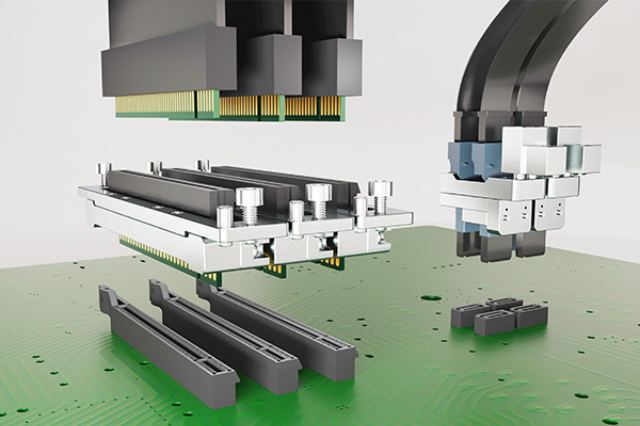
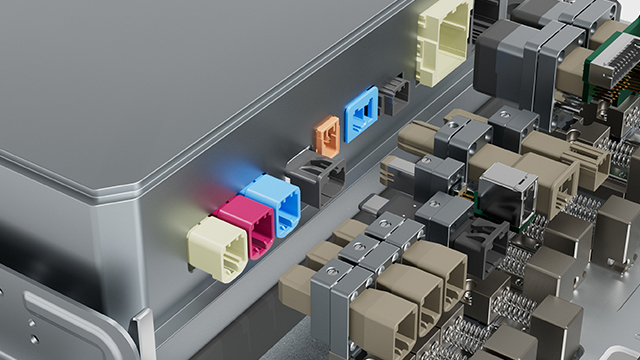
汽车电子测试转接头的小型化设计适应了车载电子系统高密度集成的趋势。随着汽车电子模块向小型化、轻量化发展,其接口也日益微型化,间距从传统的 2.54mm 缩小至 1.27mm 甚至 0.8mm。相应地,测试转接头的接触件直径也减小至 0.3mm 以下,这对加工精度提出了极高要求,尺寸公差需控制在 ±0.01mm 以内。小型化转接头采用精密注塑工艺,确保绝缘体的尺寸精度与位置度,避免插针之间的短路风险。在有限的空间内,转接头还需保持足够的机械强度,能承受 5N 以上的轴向力而不发生变形,满足汽车电子模块在组装线上的在线测试需求。耐用型汽车电子测试转接头,可承受万次插拔,降低汽车电子测试的耗材成本。
汽车电子测试模组的能耗分析功能帮助优化车载电子系统的功耗,高精度功率计模块可测量电压、电流、功率参数,采样率达 1kHz,精度 ±0.1%。能耗分析软件自动统计不同工作模式下的功耗数据,如休眠模式、正常工作模式、峰值负载等,生成能耗分布直方图。针对新能源汽车,模组可计算电子系统对续航里程的影响,为功耗优化提供量化目标。在电池管理系统测试中,能耗分析功能可验证能量回收策略的有效性,评估不同驾驶模式下的能量利用效率。汽车电子测试转接头的材质兼容性,需与汽车电子接口金属成分匹配防腐蚀。安徽自动化汽车电子柔性转接头
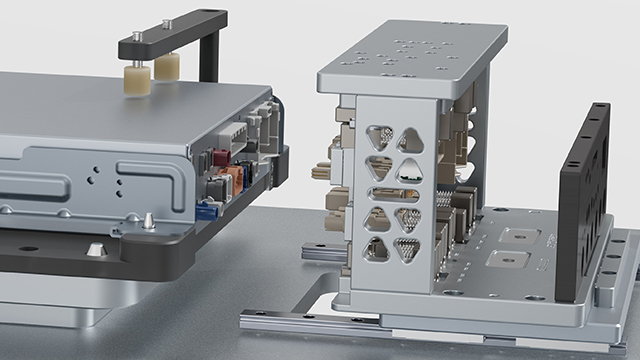
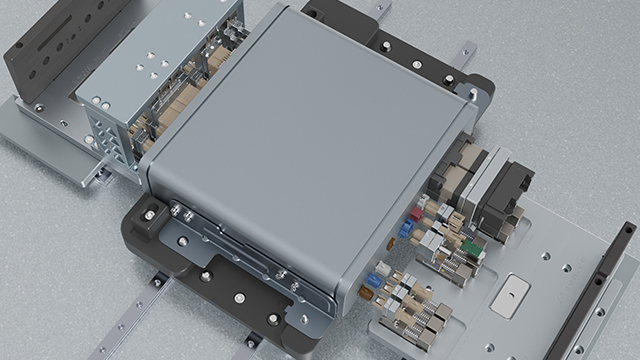
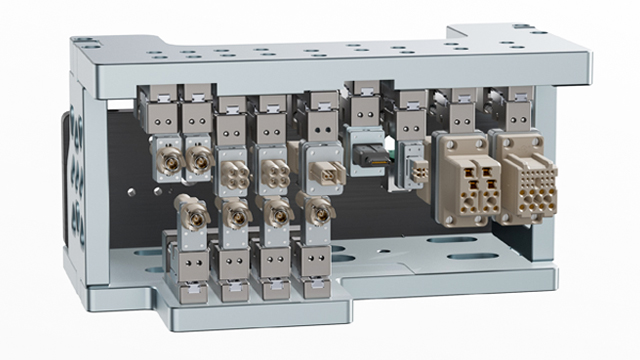
多功能汽车电子测试转接头,可同时连接多个汽车电子模块,实现并行检测。东莞安全汽车电子连接方案
汽车电子测试模组的合规性测试模块内置国际与行业标准的测试流程,如 ISO 11898(CAN 总线)、ISO 14230(KWP2000)、SAE J1939(商用车网络)等。测试序列严格遵循标准中的测试条件与判定准则,确保测试结果的威严性。针对地区性法规,如中国的 GB/T 19951、欧盟的 ECE R10 等,汽车电子测试模组提供专门的测试模板,帮助企业满足不同市场的准入要求。合规性测试报告则自动生成符合标准要求的格式,减少人工整理的工作量,加快产品的认证进程。东莞安全汽车电子连接方案