(第2篇)360°全景影像系统多路视频拼接技术凭借其全景监控、实时性、高清晰度等优势,已广泛应用于多个领域,以下结合精拓智能体相关技术方向及行业实践,详细阐述其主要应用场景:
二、智能交通与运输场景
1.无人驾驶与智能网联
-核X作用:为无人驾驶矿卡、港口AGV等提供环境感知能力,通过多路视频拼接实现实时路况识别、障碍物检测、路径规划。例如无人驾驶矿卡通过全景影像系统采集道路数据,结合AI分析优化行驶策略,同时支持远程监控与故障排查。
-技术亮点:融合激光雷达、毫米波雷达数据,提升恶劣环境下(如矿区、港口)的感知鲁棒性。
2.城市交通与道路监控-应用方式:在城市路口、桥梁、隧道等关键位置部署多摄像头,拼接形成360°全景影像,辅助交通流量监测、事故预警、违章抓拍。例如通过智能分析算法识别异常行为(如行人闯红灯、车辆逆行),实时推送至指挥中心。
三、安防与工业监控领域
1.机场、港口、码头等大型场景
-全景覆盖需求:在机场登机桥、安检区、候机大厅,或港口码头的集装箱作业区,通过多路视频拼接实现无死角监控,实时掌握人员流动、设备运行状态,预防安全隐患(如障碍物碰撞、非法入侵)。
多路视频拼接需考虑摄像头布局与选型,图像处理与传输,系统集成与调试,抗干扰与防护以及结构与安装工艺因素.河南360全景多路视频拼接系统开发平台
(第3篇)AI 360°全景影像系统多路视频拼接技术原理与应用场景详解
色彩均衡:调整亮度、对比度、白平衡,避免拼接缝处色差明显
羽化融合(Feathering):在交界区域采用渐变加权平均,消除硬边界
遮挡补偿:智能填补车轮、底盘下方不可见区域(部分依赖建模填充)
ZUI终输出:一幅连续、无断裂、自然过渡的360°环视鸟瞰图
(5)动态叠加与交互增强
叠加车辆轮廓、转向轨迹线(随方向盘转动动态预测路径)
支持多视角切换(前视、后视、左右侧视、3D自由视角)
可接入ADAS+DSMS信号,实现前向碰撞预警、车道偏离提醒等功能
3. 核X硬件支撑:精拓智能AI360全景主机为何能胜任拼接任务?
CPU采用ARM Cortex-A53四核处理器,主频≥1.5GHz,可高效运行图像拼接算法与AI推理;
内存为1GB(可扩展),支持多路高清视频缓存与并行处理;
存储方面配备8GB eMMC及SD卡插槽(默认32G),用于存储操作系统、算法程序与录像数据;
视频输入支持8路AHD_720P(6路拼接 + ADAS + DSMS),可接入ZUI多8路高清模拟视频;
视频输出提供1×AHD + 1×CVBS或双AHD同显/异显模式,兼容多种显示屏接口需求;
通信接口包含CAN、RS232、USB、百兆以太网,4G/5G处于在研阶段,实现远程监控、OTA升级与车联网集成。
天津物联网多路视频拼接系统联系方式处理单元将校正后的多路图像实时合成为360°全景俯视图,或分屏显示多视角画面.

(第4篇)360°全景影像系统多路视频拼接技术凭借其全景监控、实时性、高清晰度等优势,已广泛应用于多个领域,以下结合精拓智能体相关技术方向及行业实践,详细阐述其主要应用场景:
记录行车过程影像用于事故分析与责任认定;同时支持远程监控与驾驶员培训模拟。
五、城市管理与公共服务
1.城市规划与应急管理
-全景展示:通过城市各区域摄像头拼接全景影像,辅助规划部门直观了解城市空间结构、交通流量、市容市貌,优化城市布局;应急情况下(如火灾、交通事故),为指挥中心提供现场实时画面,支持快速调度。
-公众参与:开放全景影像数据供公众查看,促进城市规划透明度与公众互动(如反馈道路坑洼、设施损坏等问题)。
2.智慧工地与建筑施工
-监控需求:在桥梁建设、高层建筑施工中,通过多路视频拼接监控施工现场人员操作、设备运行、物料堆放,确保施工规范与安全;结合AI分析识别未佩戴安全帽、高空抛物等违规行为。
(第1篇)多路视频拼接360全景影像系统基于精拓智能体的技术支撑,已在多个领域实现深度应用,其核X价值在于通过全景监控、智能分析与远程协同提升场景安全性、效率及管理精度,具体场景如下:
一、交通与运输领域
1.无人驾驶与特种车辆
-无人驾驶矿卡/工程车:通过多摄像头实时拼接360°环境影像,结合AI算法识别道路障碍物、交通标志及路况,实现智能导航决策,优化运输路径(如矿山运输路线规划),减少能源消耗;同时支持远程监控与操作,便于故障排查和紧急响应,数据收集功能还可用于训练自动驾驶模型。
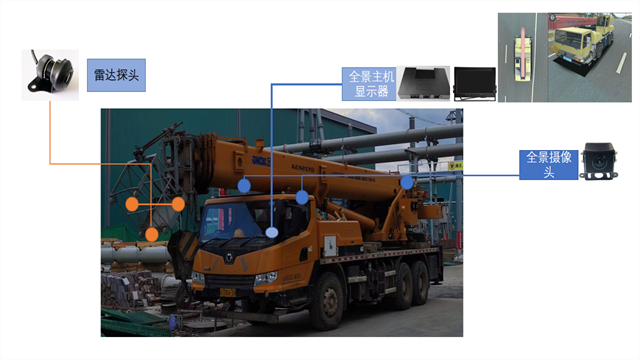
-港口/码头机械:如正面吊、集装箱起重机,系统安装于吊臂、驾驶室及货物抓取点,提供无死角视野,辅助驾驶员精细操作,避免货物碰撞;结合雷达数据实现盲区预警,降低装卸作业事故率。
-商用车/物流车:集成BSD(盲点监测)、疲劳驾驶预警功能,通过全景影像消除变道、倒车盲区,配合4G/5G传输至管理平台,实现车队远程监控与调度,提升物流运输安全性。
2.轨道交通与船舶
-火车头监控:监测轨道、信号及隧道环境,提前识别安全隐患(如轨道异物、隧道裂缝);记录行车影像用于事故分析,同时辅助驾驶员培训(模拟复杂场景操作)。
通过3-5路摄像头实现车辆周边盲区覆盖,辅助泊车,复杂路况通行,配合自动驾驶数据采集与智能预警.

(第2篇)多源信号采集实现AI360全景影像系统多路视频拼接的技术原理及应用场景分析
信号预处理与校准
原始视频需经过畸变矫正(鱼眼镜头矫正算法)、曝光与白平衡统一(消除摄像头间参数差异)、色彩一致性校准(基于标定板的像素级校准),确保不同摄像头图像在几何与色彩空间中对齐。
2.时空同步:多源数据的精细对齐
时间同步:通过硬件PTP(精确时间协议)或软件时间戳机制,确保多路视频流与传感器数据的时间偏差<1ms,避免运动场景下的拼接错位(如车辆高速行驶时的画面撕裂)。
空间同步:基于相机标定(内外参数矩阵计算)与坐标系转换,将不同视角的图像投影至统一的鸟瞰图(BEV)或全景球面坐标系,建立像素点与物理空间位置的映射关系。
3. 图像融合拼接:算法层的无缝合成
拼接算法核X:
特征点匹配:采用SIFT/SURF或深度学习特征提取算法(如SuperPoint),识别图像重叠区域的关键特征(如边缘、角点),计算透S变换矩阵(Homography Matrix)。
接缝融合:通过加权平均、泊松融合或GAN-based图像修复技术,消除拼接缝处的亮度/色彩差异,实现“无接缝”全景效果。
车侣提供360度无缝拼接解决方案,预留丰富接口,如RS232,RJ45,以太网,CAN等,便于集成多功能产品.天津物联网多路视频拼接系统联系方式
6路拼接确保所有摄像头在时间和设置上的同步,以避免拼接时的时间差异和色彩不一致.河南360全景多路视频拼接系统开发平台
(第4篇)6路拼接+2路监控(ADAS+DSMS)360全景影像系统的工作原理
4.港口与矿区等封闭场景
-场景需求:港口集装箱车、矿区自卸车在封闭区域内高频次往返,需应对复杂路况及多车协同作业。
-系统价值:
-全景影像与ADAS结合,辅助驾驶员在狭窄通道内精细转向,避免碰撞堆放的货物或其他工程设备;
-DSMS防止驾驶员因长时间单调作业产生疲劳,4G上传的监控数据支持调度中心实时协调多车动线,优化作业流程。通过6路拼接全景、ADAS/DSMS双监控及云平台集成,该系统实现了“环境感知-行为监测-远程监管”的全链路安全保障,广F适用于对操作安全性、管理精细化要求高的商用及特种车辆领域。 河南360全景多路视频拼接系统开发平台