(第1篇)定制AI360全景影像集成雷达解决方案:功能应用与核X优势解析
一、功能应用:多场景智能感知与决策支持
系统通过360°全景影像+多传感器融合,实现全场景环境感知与风险管控,核X功能覆盖三大维度:
1. 全时段无盲区环境监控
(1)360°全景视野构建:通过6个广角摄像头(鱼眼镜头,视角≥200°) 与激光雷达(探测距离0.2m~50m)、毫米波雷达(0.2m~40m) 协同,实时拼接船舶/车辆周边环境影像,支持特写巡航+全景分屏(如上下180°画面)、俯视图+多视角切换(侧视、后视等),消除传统监控中“视觉死角”问题。
(2)恶劣环境适配:设备防护等级达IP67/IP68,支持-40℃~70℃工作温度,在雨雾、沙尘、夜间等场景下,通过夜视摄像头+雷达数据补偿,确保成像清晰度与障碍物识别稳定性。
2. 智能障碍物识别与碰撞预警
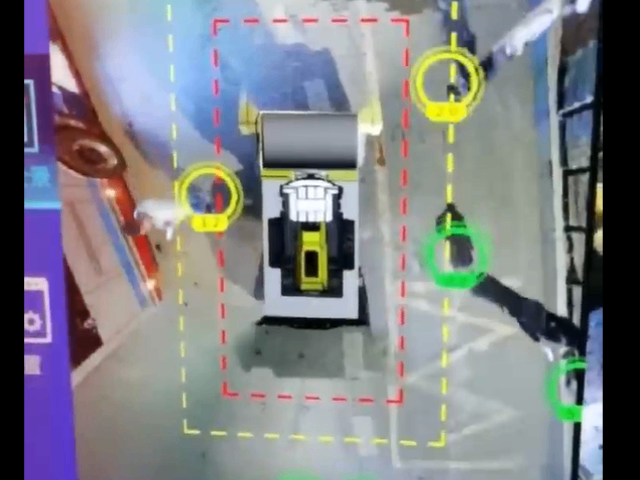
(1)多目标实时检测:AI算法融合影像与雷达数据,可识别行人、船舶、码头设施、航标等障碍物,测距精度达0.5m,并通过红色/绿色警戒线标注安全距离(如靠泊时距离岸边<阈值触发语音告警)。
360全景和雷达融合用于机器人导航作业监控,获取周围全景视图,实时检测障碍物和动态目标,自主导航和避障.汽车360全景影像安装
(下篇)车侣定制方案中的三大硬件平台(亿智主动安全一体机、全志T507、瑞芯微RK3588)在功能及应用上存在明显区别,以下是详细阐述:
应用场景:广泛应用于工程机械领域,为设备提供智能监控和故障诊断功能。适用于后装市场,为已有车辆提供智能化升级方案,提升车辆性能和安全性。
3.瑞芯微RK3588硬件平台定位:高D前装智能座舱方案功能特点:AI算力:拥有6TOPS的NPU算力,支持实时行人检测、DMS(驾驶员监测系统)等高级AI功能。摄像头接口:提供12路摄像头接口,适配8-12路4K全景影像和4路舱内监控,满足高D智能座舱对高清影像的需求。扩展能力:支持PCIe扩展和多屏交互,为智能座舱提供丰富的娱乐和交互功能。应用场景:主要用于高D乘用车的前装市场,为车辆提供智能化的座舱体验,提升驾乘舒适性和安全性。适用于需要高度集成化和智能化的特种车辆监控场景,提供冗余的AI分析能力。
总结:亿智主动安全一体机适用于商用车后装和特种车辆监控,强调环境适应性和安全性;全志T507适用于工控和后装市场,注重成本效益和工业适配性;瑞芯微RK3588则面向高D前装智能座舱,提供强大的AI算力和高清影像支持。用户可根据具体需求和场景选择合适的硬件平台进行定制。 正面吊360全景影像设备采购360全景多路视频拼接系统采用“采集→处理→融合→输出”四层架构,其中多源信号采集是整个流程的基础环节.

(篇四)AI360全景影像系统通过纯视觉算法保障挖掘机操作安全的技术实现AI360全景影像系统以纯视觉算法为核X,通过多摄像头协同、AI目标识别、动态安全区域校准、边缘计算等技术,构建了一套覆盖挖掘机10米作业半径的主动安全防护体系。其技术实现可拆解为以下五个关键模块:
5.技术局限与改进方向极端天气影响:大雾/沙尘暴可能降低摄像头识别精度,未来需融合毫米波雷达作为冗余备份(非纯视觉方案)。算法持续迭代:通过实际场景数据训练模型,提升小目标(如工具、碎石)的检出率。例如,某矿山场景中,系统通过增加“碎石”类别训练数据,将小目标漏检率降低30%。
(上篇)车侣正面吊AI360视觉解决方案适用场景及其优越性详述:
一、集装箱堆场高效作业场景
1. 盲区动态监控与防撞适用痛点:在集装箱密集堆放的堆场中,驾驶员存在视觉死角,易发生碰撞堆垛或行人的事故。方案能力与优越性:6路广角摄像头:提供190°视野,覆盖车体四周,延伸盲区监测至车尾15米,精度达到±2cm,大幅减少视觉盲区。动态BSD盲区检测:联动声光报警与自动刹停功能,响应时间≤0.5s,快速应对突发情况,舟山港部署后盲区事故下降92%,明显提升作业安全性。
2. 吊具精细定位与货物安全适用痛点:吊具挂钩偏移可能导致货物跌落,造成经济损失和安全隐患。方案能力与优越性:AI实时识别:准确识别吊具挂钩状态,偏移量超阈值即时告警,准确率≥95%,有效防止货物跌落。激光雷达选配:探测距离达250m,扫描低矮障碍物生成3D环境地图,增强低矮障碍感知能力,提升作业精度。二、复杂环境适应性场景
1. 夜间/低光作业环境挑战:夜间或低光环境下,能见度低,影响作业效率。技术应对方案与优越性:星光级摄像头+红外补光:支持0.01Lux微光环境,夜间集装箱堆放效率提升15%,确保夜间作业顺利进行。
360全景影像融合雷达系统,通过中控屏幕全景图像看到车辆与周围障碍物的距离,同时雷达发出声音和视觉警报.

(第4篇)车侣AI 360全景影像系统网口输出、BSD盲区预警与4G云台车辆运营管理技术集成到机器人身上,可形成一套多功能、智能化的机器人解决方案,适用于工业巡检、特种作业、物流运输等场景。以下为具体应用分析:
五、总结将AI360全景影像系统网口输出、BSD盲区预警与4G云台车辆运营管理技术集成到机器人身上,可明显提升机器人的环境感知、安全保障与远程管理能力。该方案适用于工业巡检、特种作业、物流运输等场景,未来随着5G与AI技术的进一步发展,机器人将具备更强的智能化与自主化能力。 精拓智能AI360全景影像集成系统可配合甲方进行专网部署,定制中Y监控,远程管理及行驶状态数据分析功能.搅拌车360全景影像哪个牌子好
360全景影像透S功能在挖掘机上的应用,全方W无死角,精确定W,实时监控与预警.-广州精拓电子科技有限公司.汽车360全景影像安装
(第2篇)售后篇——AI360全景影像系统实现ONVIF网络传输时,影响成像显示速度的因素有哪些?
AI360全景影像系统需通过RTSP/RTMP协议输出视频流,H.265编码虽能降低带宽占用,但编码/解码过程的计算开销可能增加端到端延迟。若设备端采用低效编码算法或硬件解码能力不足,会导致全景画面合成滞后。
网络抖动与丢包
工业现场常见网络波动(如交换机级联过多、线路老化)引发数据包乱序或丢失;T
CP重传机制虽保证可靠性,但明显增加端到端延迟;
UDP虽低延迟但无纠错能力,需依赖上层协议(如RTP/RTCP)补偿。
网络抖动或丢包会触发重传机制,进一步增加显示延迟,尤其在矿山、工地等电磁干扰复杂场景中更为明显。
二、硬件性能与处理能力——成像处理的“大脑中枢”
1.图像拼接与处理单元
AI360全景影像系统的成像流程为:原始图像采集→鱼眼畸变校正→多视图配准→动态拼接融合→AI增强(去雾/夜视)→编码输出
此过程高度依赖边缘计算平台的处理能力。
核X组件:
FPGA:用于低延迟并行图像处理,适合固定算法流水线;
AI加速芯片(如寒武纪MLU、地平线BPU):执行深度学习-based拼接、目标感知融合;
GPU/NPU协处理器:提升卷积运算效率,缩短拼接时间。
汽车360全景影像安装