误区四:刚性匹配忽视动态响应某锂电池叠片机因模组刚性不足产生0.12mm振幅,导致极片对齐失败。选型时需计算系统固有频率:当驱动频率接近模组固有频率的80%时,必须更换更高刚性的型号。建议采用k=3EI/L³公式校核,确保系统刚度值≥50N/μm。多轴联动场景更需整体考量。机器人第七轴案例表明,当X轴模组刚性比Y轴高30%时,会产生17%的轨迹偏差。应通过有限元分析验证多轴刚度匹配,必要时采用加强筋结构或改变支撑跨距。误区五:忽视全生命周期成本某光伏串焊机选型时比较采购成本,未计算维护费用。进口模组5年总成本达28万,而国产模组虽然贵5万采购价,但润滑周期延长3倍,总成本反低9万。建议建立TCO模型,将能耗、保养、备件损耗纳入计算。模块化设计可降低隐性成本。某汽车厂通过选用可快速更换的导轨模组,使产线改造时间从72小时缩短至8小时。选型时应优先考虑具备快拆结构、标准化接口的产品。直线模组具有防撞功能,当发生误操作时,系统会根据电机扭力自动判断并停止动作,从而减少损失。徐州线性模组
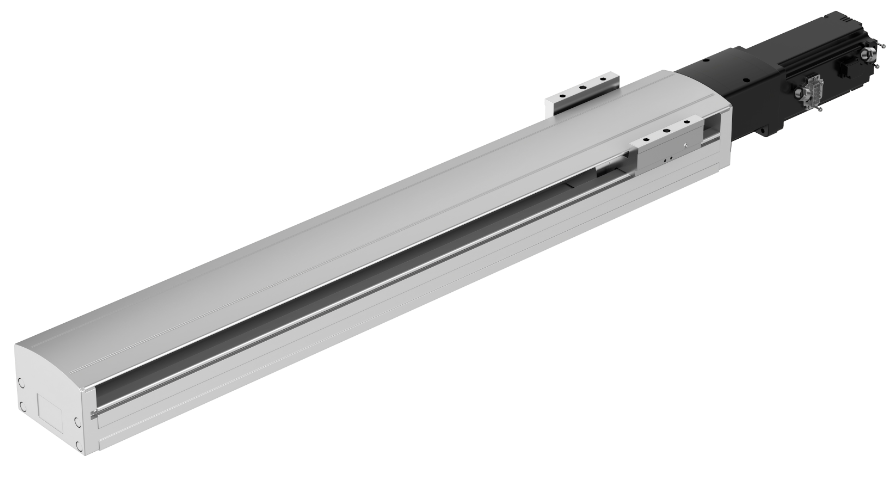
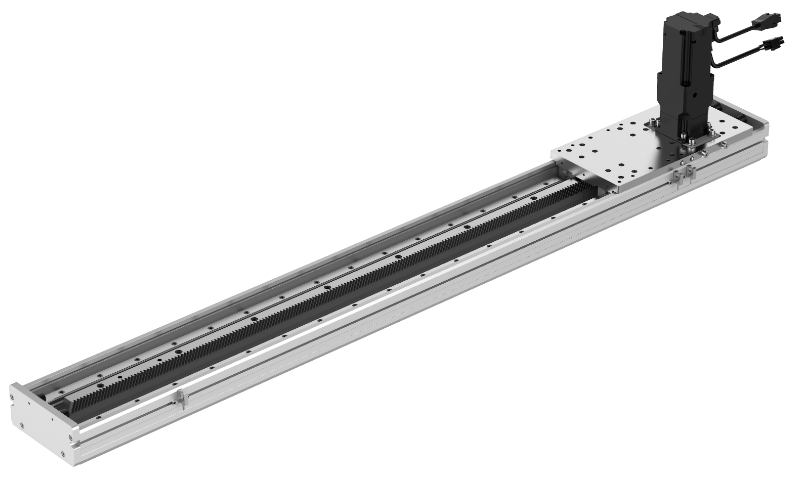
在自动化设备、机械臂、3D打印等领域,KK模组和直线模组都是常见的线性运动解决方案,但它们的结构、性能和应用场景却有很大不同。苏州尚恩格就带您详细对比一下这两者的区别,帮助你做出更合适的选择!什么是直线模组?直线模组是一个更大范围的概念,泛指所有能实现直线运动的模组,包括丝杠模组、皮带模组、齿轮齿条模组,以及高性能的直线电机模组。(1)传统直线模组(丝杠/皮带驱动)这类模组和KK模组类似,但通常结构更稳固、负载能力更强,适用于工业自动化、机床、物流分拣等场景。(2)直线电机模组(选择)直线电机模组采用无接触电磁驱动,直接利用电磁力推动负载运动,没有机械传动部件(如丝杠、皮带),因此具备超高速度、超高精度和长寿命。扬州三坐标直线模组同步带式直线模组通过电机驱动同步带,带动滑块运动。
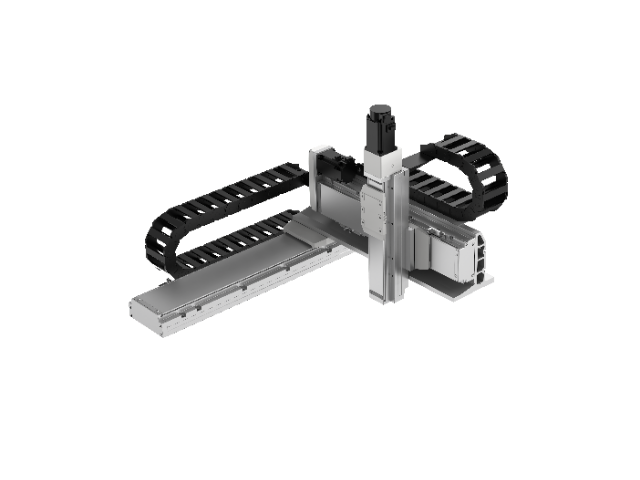
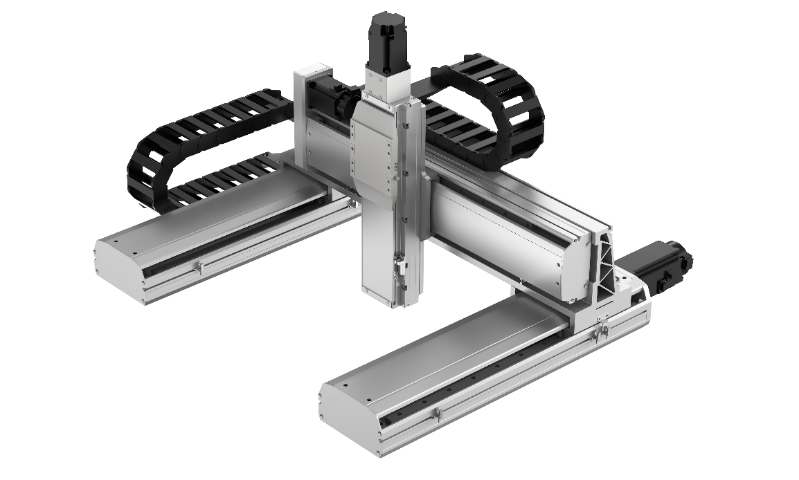
直线模组在机器人技术中扮演什么角色?此外,直线模组的模块化设计使得它们易于与其他机器人组件进行集成。无论是与机器人手臂、视觉系统还是传感器结合,直线模组都能发挥出色的性能。这种灵活性使得工程师能够根据具体的应用需求,快速构建出高效的自动化系统。例如,在自动化仓库中,直线模组可以与AGV(自动导引车)结合,实现货物的自动搬运和分拣,提高了物流效率。在精密制造领域,直线模组的高重复定位精度和稳定性尤为重要。许多制造业,如航空航天、医疗器械和半导体等,对产品的精度要求极高。直线模组能够在微米级别的范围内进行精确控制,确保每一个生产环节都符合严格的质量标准。这种高精度的运动控制不仅提高了产品的一致性,也降低了因人为操作失误导致的损耗。
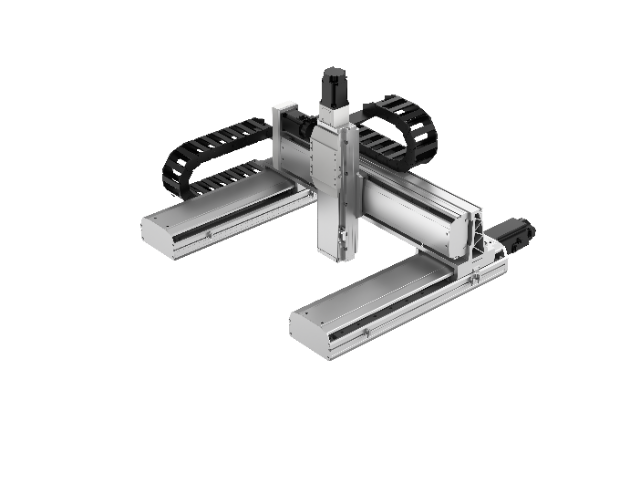
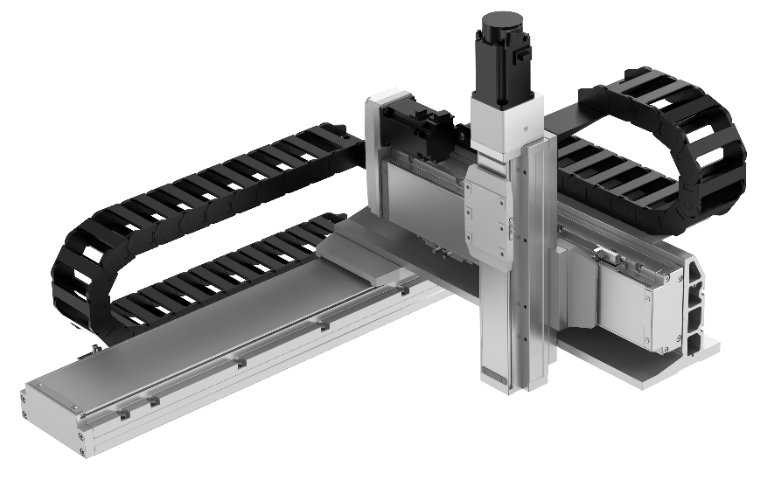
直线模组发展至今,应用范围一直在扩大。比如在非标自动化设备中,直线模组就大展身手:●自动焊接设备,直线模组负责焊枪的运动;●自动组装机,直线模组负责将一个零件装到另一个零件上:●自动检测机,直线模组负责将待检验产品送到CCD检测范围内;●在线式全自动点胶设备,直线模组实现空间三轴自动点胶;●自动植螺母机,直线模组负责将加热后的螺母装到汽车零件内不仅如此,线型模组还在其他领域中也得到广泛应用,比如:●领域:生产机械、模拟仿真●食品领域:分类机械、上料机械等●喷涂领域:往复机械、喷涂机械等●汽车领域:抓取机械、移载机械等●物流领域:分类机械、移载机械等直线模组和注塑机的动作必须一致,既不会产生撞机也不会干涉注塑机的动作。
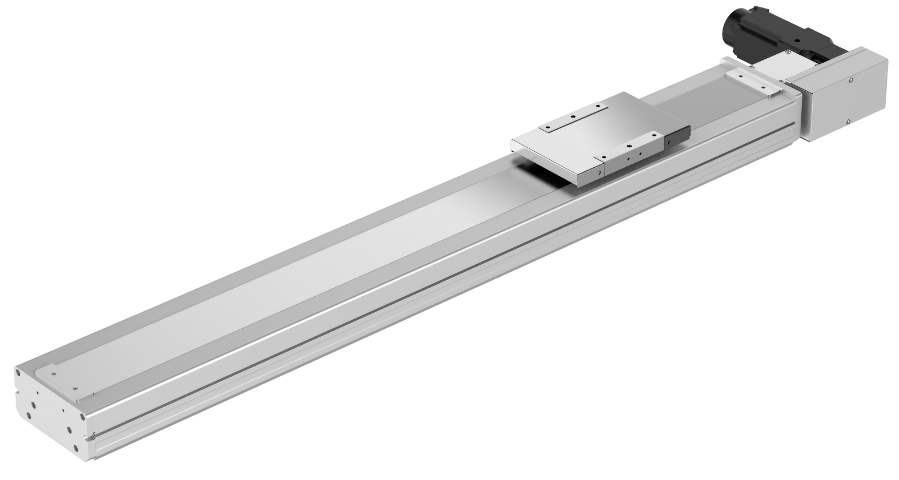
直线模组定位不准调整技巧对于因导轨平行度偏差导致的定位不准,需重新调整导轨。用百分表检测模组两侧导轨的平行度(误差应≤0.01mm/m),若偏差超标,松开导轨固定螺丝,在偏低一侧垫入对应厚度的金属垫片(厚度=偏差值),逐步微调至平行度达标后紧固螺丝,再次测试定位精度。检查负载与润滑状况。若模组负载超过额定值,需减轻负载或更换更高负载等级的模组;定期添加润滑脂,确保丝杠与导轨润滑充分,减少摩擦阻力不均导致的定位波动。调整完成后,连续运行30次定位循环,确保每次定位误差≤0.005mm,稳定性达标。滚珠丝杠直线模组通过旋转电机带动丝杠转动,使螺母滑块直线运动。蚌埠模组联系方式
直线模组的安装精度标准通常取决于具体的应用和所需的精度水平。徐州线性模组
直线模组定位不准调整技巧首先排查机械结构连接问题。检查模组的滚珠丝杠与电机联轴器是否松动,若存在间隙,需松开联轴器固定螺丝,重新对齐丝杠轴与电机轴(同轴度误差≤0.02mm),再按规定力矩(通常15-20N・m)紧固;查看滑块与工作台的连接螺丝是否拧紧,用扭矩扳手逐颗检查,确保无松动,避免因连接虚位导致定位偏差。其次校准脉冲参数与补偿设置。进入数控系统参数界面,核对电子齿轮比是否与模组导程、电机步距角匹配(计算公式:电子齿轮比=(导程×1000)/(电机步距角×减速比)),若参数错误需重新设定;针对定位累积误差,可通过系统的“定位补偿”功能,在特定位置设置补偿值(如在500mm处偏差0.02mm,补偿+0.02mm),多次测试后将误差控制在0.01mm以内。徐州线性模组
苏州尚恩格科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的电工电气中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同苏州尚恩格科技公司供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!