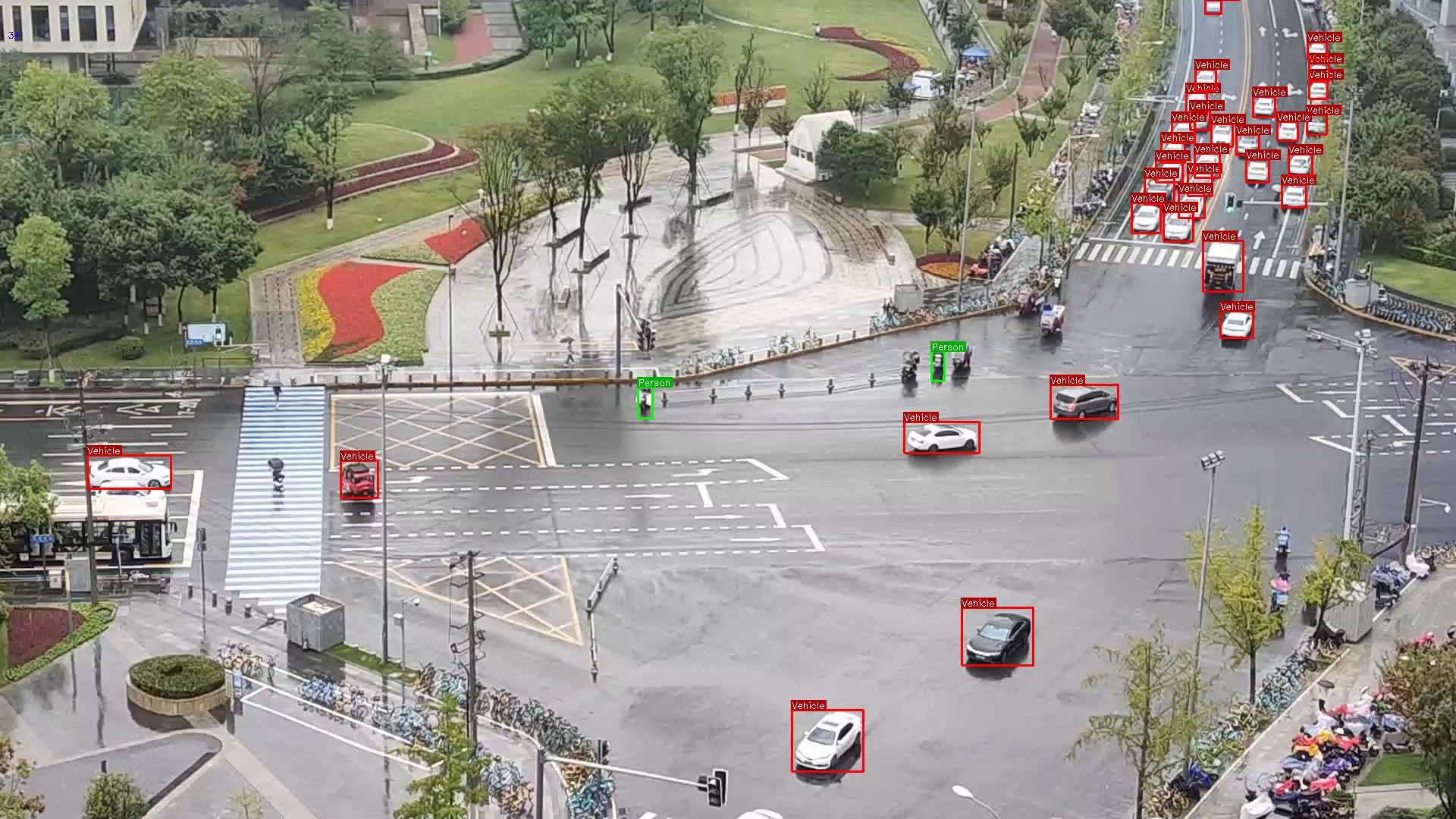
经过算法的不断升级验证,Viztra-LE026图像处理板能够以30Hz的帧率跟踪像素为2*2的目标,能够识别**小像素为12*12的目标,整个延迟不高于100ms,识别精度能够大于85%。无人机作业,续航是使用者首要考虑的。Viztra-LE026的设计正是考虑了这项因素,首先重量上就不会给无人机...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
在深度学习中,解决训练数据不足常用的一个技巧是“预训练-微调”(Pretraining-finetune),即大数据集上面预训练模型,然后在小数据集上去微调权重。但是,在训练数据极其稀少的时候(只有个位数的训练图片),这个技巧是无法奏效的。图2展示了一个检测模型预训练过后,在单张训练图片上微调的过程:尽管训练集上逐渐收敛,但是检测器仍无法检测出测试图片中的物体。这反映出了“预训练-微调”框架的泛化能力不足。利用SpeedDP经过大量的数据训练后,机器就能够精确检测跟踪图像中的物体。推荐使用慧视光电的跟踪板卡。湖北快速目标跟踪
目标跟踪
自动化的视频跟踪系统的工作流程一般是摄像机的模拟信号通过视频电缆传送至计算机,计算机通过视频采集卡将模拟视频信号转换为数字视频信号,该转换的输出的数字图像一方面在计算机CRT上显示,同时传送至内存进行目标检测或跟踪(根据需要可同时进行硬盘录像),计算机根据算法的运算结果来控制摄像机的云台,这个控制过程是通过通讯协议卡和双绞线电缆和摄像机的云台接口来完成的。监视和跟踪系统的启动可以是人工的,也可以由系统的报警输入设备启动。高性能的图像卡一般自带显卡,能够避免廉价的多媒体卡长时间地、连续地通过总线传送到计算机的显存而带来的死屏、CPU的占用及总线的占用等问题。吉林什么目标跟踪RK3399PRO图像处理板识别概率超过85%。

检测器的输出通常被用作跟踪设备的输入,跟踪设备的输出被提供给运动预测算法,该算法预测物体在接下来的几秒钟内将移动到哪里。然而,在无检测跟踪中,情况并非如此。基于DFT的模型要求必须在首帧中手动初始化固定数量的对象,然后必须在随后的帧中对这些对象进行定位。DFT是一项困难的任务,因为关于要跟踪的对象的信息有限,而且这些信息不清楚。结果,初始边界框与背景中的感兴趣对象近似,并且对象的外观可能随着时间的推移而急剧改变。
2010年以前,目标跟踪领域大部分采用一些经典的跟踪方法,比如Meanshift、Particle Filter和Kalman Filter,以及基于特征点的光流算法等。Meanshift方法是一种基于概率密度分布的跟踪方法,使目标的搜索一直沿着概率梯度上升的方向,迭代收敛到概率密度分布的局部峰值上。首先Meanshift会对目标进行建模,比如利用目标的颜色分布来描述目标,然后计算目标在下一帧图像上的概率分布,从而迭代得到局部密集的区域。Meanshift适用于目标的色彩模型和背景差异比较大的情形,早期也用于人脸跟踪。由于Meanshift方法的快速计算,它的很多改进方法也一直适用至今。如何实现稳定的目标跟踪?

人工智能起源于上个世纪五十年代,被誉为新时代工业发展的引擎。随着技术的发展,为了使得计算机可以拥有像人眼一样感知、分析、处理现实世界的能力,六十年代初,人工智能衍生出了一个重要的分支,计算机视觉。在计算机视觉的研究过程中,学者们为了阐述“根据目标在视频中的某一帧状态来估计其在后续帧中的状态”,一个新的学科——目标跟踪应运而生。目标跟踪是计算机视觉和机器人研发领域的重要分支,在人机交互、安全监控、自动驾驶、城市交通、军领域、医疗诊断等领域都发挥了重要的作用,其主要功能就是在视频图像中遍历感兴趣的区域,并在接下来的视频帧中对其进行跟踪慧视RK3399图像处理板能实现24小时、无间隙信息化监控。可靠目标跟踪报价行情
慧视光电开发的慧视RV1126图像处理板,采用了国产高性能CPU。湖北快速目标跟踪
目标运动估计是根据目标在过去的位置对目标的运动规律加以总结,并以此对目标将来的运动状态进行预测。正确的预测,可以缩小匹配的计算区域,大幅的降低匹配计算量。在视频跟踪系统中由于被跟踪的目标处于运动状态,为了把目标始终保持在摄像机视野之内,必须对摄像机加以控制。在实际应用中,摄像机被固定在云台上,云台本身不做平移运动,但可以控制云台进行水平摆动和上下俯仰,从而带动摄像机做相应运动。所以,对摄像机的控制就是对云台的控制。湖北快速目标跟踪
与目标跟踪相关的文章
省时省力目标跟踪有什么
- 多系统适配目标跟踪批发价格 2026-04-28
- 工业目标跟踪经验丰富 2026-04-28
- 山东哪些目标跟踪 2026-04-28
- 安徽目标跟踪诚信推荐 2026-04-28
- 新疆网络目标跟踪 2026-04-28
- 海南流畅目标跟踪 2026-04-28
- 云南目标跟踪功能 2026-04-28
- 福建目标跟踪好选择 2026-04-28
- 哪些目标跟踪销售厂家 2026-04-28
- 工业目标跟踪市场报价 2026-04-28
- 广东目标跟踪价格信息 2026-04-27
- 广西目标跟踪批发商 2026-04-27
与目标跟踪相关的产品



与目标跟踪相关的新闻
-
贵州稳定目标跟踪 2026-04-27 16:01:13深度学习技术,特别是神经网络,已经在图像和语音跟踪领域取得了不小的进展。这些技术可以应用于物联网设备,实现更加智能化的交互和控制。物联网、人工智能和大数据的融合正在开启一个智能化的新纪元。这种融合不仅推动了技术革新,还为各行各业带来了深刻的变革。随着技术的不断发展,这一融合将推动智能家居、智能城市、...
-
江西信息化目标跟踪 2026-04-27 00:11:36东北虎作为生活在我国东北地区的保护动物,时不时会闯入居民区,给居民生命安全造成威胁,此前不就黑龙江七台河市勃利县一村落就出现了东北虎伤人事件,伤人后东北虎不知去向,消防和公安紧急寻找。值得关注的是,公安采用了无人机进行巡查,这种方式不仅比传统的地毯式搜索效率更高,而且面对东北虎这样危险的生物,安全性...
-
无源目标跟踪 2026-04-27 17:01:12成都慧视开发的RK3588系列高性能图像处理板Viztra-HE030,能够在-40℃~65℃的环境中进行工作,用在寒冷的北方冬天电力巡检领域,可以有效支撑无人机的稳定工作。此外,这款板卡的存储温度范围在-55℃~75℃,遇到更加极端寒冷的天气时,不使用也能够有效抗寒。RK3588属于旗舰机芯片,搭...
-
数据目标跟踪厂家电话 2026-04-27 17:01:12成都慧视推出的深度学习算法开发平台SpeedDP,它的主要功能就是帮助进行算法模型的测试验证,进行快速的针对大量数据的AI自动标注,然后提升自身算法能力。在无人机智能炮弹测试验证中,通过对原始算法的模型训练,能够不断评估算法的能力,然后对新的打击数据集目标进行AI自动标注,让算法在学习中不断变得聪明...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

辽宁智慧消防AI智能高效处理
2026-04-29 -

浙江省时省力目标识别远程协助
2026-04-28 -
黑龙江哪里有目标识别郑重承诺
2026-04-28 -

多系统适配目标跟踪批发价格
2026-04-28 -

内蒙古图像处理板进货价
2026-04-28 -
重庆低压线目标识别定制
2026-04-28 -
江西目标识别供应商
2026-04-28 -

广西安全目标识别经验丰富
2026-04-28 -
广西国产化目标识别远程控制
2026-04-28